

Changed Position
I moved to Constructor University Bremen.Former UHH Contact Details
| address: | University of Hamburg Faculty of Mathematics, Informatics and Natural Science Department Informatics, Group TAMS Vogt-Kölln-Straße 30 D-22527 Hamburg |
| position: | Research Associate |
| room: | F-315 |
| phone: | +49 (0) 40 42883-2432 |
| e-mail: | |
| github: | https://github.com/v4hn |
Publications & Talks
2024
-
Manuel Gomes,
Michael Görner,
Miguel Riem Oliveira,
Jianwei Zhang,
Sensor-agnostic Visuo-Tactile Robot Calibration Exploiting Assembly-Precision Model Geometries,
International Conference on Intelligent Robots and Systems, IROS 2024, Abu Dhabi.
[DOI 10.1109/IROS58592.2024.10801647] -
Michael Görner,
Norman Hendrich,
Jianwei Zhang,
Pluck and Play: Self-supervised Exploration of Chordophones for Robotic Playing,
International Conference on Robotics and Automation, ICRA 2024, Yokohama, Japan.
[Video], [Code], [Data], [DOI 10.1109/ICRA57147.2024.10610120]
2023
-
Björn Sygo,
Shang-Ching Liu,
Fabian Wieczorek,
Mykhailo Koshil,
Michael Görner,
Norman Hendrich,
Jianwei Zhang,
Multi-Stage Book Perception and Bimanual Manipulation for Rearranging Book Shelves,
The 18th International Conference on Intelligent Autonomous Systems, IAS-18 2023, Suwon, Korea.
[Video], [Paper], [DOI 10.1007/978-3-031-44851-5_38] -
Niklas Fiedler,
Jasper Güldenstein,
Theresa Naß,
Michael Görner,
Norman Hendrich,
Jianwei Zhang,
A Multimodal Robotic Blackjack Dealer: Design, Implementation, and Reliability Analysis,
The 18th International Conference on Intelligent Autonomous Systems, IAS-18 2023, Suwon, Korea.
[Video], [Paper], [DOI 10.1007/978-3-031-44981-9_24]
2022
-
Jianzhi Lyu,
Alexander Maye,
Michael Görner,
Philipp Ruppel,
Andreas K. Engel and
Jianwei Zhang,
Coordinating human-robot collaboration by EEG-based human intention prediction and vigilance control,
Frontiers in Neurorobotics, 2022.
[Video], [DOI 10.3389/fnbot.2022.1068274] -
Jianzhi Lyu,
Philipp Ruppel,
Norman Hendrich,
Shuang Li,
Michael Görner,
and Jianwei Zhang,
Efficient and Collision-Free Human-Robot Collaboration Based on Intention and Trajectory Prediction,
IEEE Transactions on Cognitive and Developmental Systems, 2022.
[Video], [DOI 10.1109/TCDS.2022.3215093] -
Michael Görner
What's Past the End? The Future of ROS One,
ROSCon-2022, October 19-21, 2022, Kyoto Japan.
[Video], [Slides] -
Michael Görner*,
David Pivin*,
Francois Michaud,
and Jianwei Zhang,
The MoveIt Benchmark Suite for Whole-Stack Planner Evaluation,
Workshop on Evaluating Motion Planning Performance at International Conference on Intelligent Robots and Systems, IROS 2022, Kyoto, Japan.
[PDF], [WS Link] -
Lin Cong,
Hongzhuo Liang,
Philipp Ruppel,
Yunlei Shi,
Michael Görner,
Norman Hendrich,
and Jianwei Zhang,
Reinforcement Learning with Vision-Proprioception Model for Robot Planar Pushing,
Frontiers in Neurorobotics, Vol 16, 2022.
[Video], [DOI 10.3389/fnbot.2022.829437]
2021
-
Máximo A. Roa,
Mehmet Dogar,
Jordi Pages,
Carlos Vivas,
Antonio Morales,
Nikolaus Correll,
Michael Görner,
Jan Rosell,
Sergi Foix,
Raphael Memmesheimer,
and Francesco Ferro,
Mobile Manipulation Hackathon: Moving Into Real-World Applications,
IEEE Robotics & Automation Magazine, March 2021, p. 2-14.
[Video], [DOI 10.1109/MRA.2021.3061951]
2020
-
Philipp Ruppel,
Michael Görner,
Norman Hendrich,
and Jianwei Zhang,
Detection and Reconstruction of Transparent Objects with Infrared Projection-based RGB-D Cameras,
International Conference on Cognitive Systems and Information Processing, ICCSIP 2020, Zhuhai, China.
[DOI 10.1007/978-981-16-2336-3_53] -
Focko L. Higgen,
Philipp Ruppel,
Michael Görner,
Matthias Kerzel,
Norman Hendrich,
Jan Feldheim,
Stefan Wermter,
Jianwei Zhang,
and Christian Gerloff,
Crossmodal Pattern Discrimination in Humans and Robots: A Visuo-Tactile Case Study,
Frontiers in Robotics and AI 2020, Volume 7.
[DOI 10.3389/frobt.2020.540565] -
Lin Cong,
Michael Görner,
Philipp Ruppel,
Hongzhuo Liang,
Norman Hendrich,
and Jianwei Zhang,
Self-Adapting Recurrent Models for Object Pushing from Learning in Simulation,
International Conference on Intelligent Robots and Systems, IROS 2020, Las Vegas, USA.
[Video], [DOI 10.1109/IROS45743.2020.9341076], [ArXiv], [Code] -
Ronja Güldenring,
Michael Görner,
Norman Hendrich,
Niels Jul Jacobsen,
and Jianwei Zhang,
Learning Local Planners for Human-aware Navigation in Indoor Environments,
International Conference on Intelligent Robots and Systems, IROS 2020, Las Vegas, USA.
[Video], [DOI 10.1109/IROS45743.2020.9341783], [Code]
2019
-
Michael Görner*,
Robert Haschke*,
Helge Ritter,
and Jianwei Zhang,
MoveIt! Task Constructor for Task-Level Motion Planning,
International Conference on Robotics and Automation, ICRA 2019, Montreal, Canada.
[Video], [DOI 10.1109/ICRA.2019.8793898], [PDF], [Code] -
Hongzhuo Liang*, Xiaojian Ma*, Shuang Li, Michael Görner, Song Tang, Bin Fang, Fuchun Sun, and Jianwei Zhang,
PointNetGPD: Detecting Grasp Configurations from Point Sets,
International Conference on Robotics and Automation, ICRA 2019, Montreal, Canada.
[Video], [DOI 10.1109/ICRA.2019.8794435], [PDF], [Code] -
Shuang Li*, Xiaojian Ma*, Hongzhuo Liang, Michael Görner, Philipp Ruppel, Bin Fang, Fuchun Sun, and Jianwei Zhang,
Vision-based Teleoperation of Shadow Dexterous Hand using End-to-End Deep Neural Network,
International Conference on Robotics and Automation, ICRA 2019, Montreal, Canada.
[Video], [DOI 10.1109/ICRA.2019.8794277], [PDF], [Code]
2018
-
Focko Higgen,
Philipp Ruppel,
Michael Görner,
Matthias Kerzel,
Sven Magg,
and Norman Hendrich,
Crossmodal Pattern Discrimination in Humans and Robots: A Visuo-Tactile Case Study,
Workshop on Crossmodal Learning for Intelligent Robotics at International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain.
[PDF] -
Michael Görner*,
Lars Henning Kayser*,
Matthias Kerzel,
Stefan Wermter
and Jianwei Zhang,
Planning to Poke: Sampling-based Planning with Self-Explored Neural Forward Models,
Workshop on Machine Learning in Robot Motion Planning at International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain.
[Link] -
Hadi Beik-Mohammadi,
Matthias Kerzel,
Michael Görner,
Mohammad Ali Zamani,
Manfred Eppe,
and Stefan Wermter,
Neural End-to-End Learning of Reach for Grasp Ability with a 6-DoF Robot Arm,
Workshop on Machine Learning in Robot Motion Planning at International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain.
[Link] -
Dennis Krupke,
Frank Steinicke,
Paul Lubos,
Yannick Jonetzko,
Michael Görner
and Jianwei Zhang,
Comparison of Multimodal Heading and Pointing Gestures for Co-Located Mixed Reality Human-Robot Interaction,
International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain.
[DOI 10.1109/IROS.2018.8594043] -
Michael Görner,
Robert Haschke.
MoveIt! Task Planning,
ROSCon-2018, September 29-30, 2018, Madrid Spain.
[Slides], [Video] -
Philipp Ruppel,
Yannick Jonetzko,
Michael Görner,
Norman Hendrich
and Jianwei Zhang,
Simulation of the SynTouch BioTac Sensor,
The 15th International Conference on Intelligent Autonomous Systems, IAS-15 2018, Baden-Baden, Germany.
[DOI 10.1007/978-3-030-01370-7_30], [Dataset] -
Hongzhuo Liang,
Shuang Li,
Michael Görner
and Jianwei Zhang,
Generating Robust Grasps for Unknown Objects in Clutter Using Point Cloud Data,
Shanghai International Symposium on Human-Centered Robotics (HCR), 2018.
[PDF]
2017
-
Michael Görner,
Philipp Ruppel,
Norman Hendrich.
Upgrading MoveIt!,
ROSCon-2017, September 21-22, 2017, Vancouver Canada.
[Video], [Slides]
2016
-
Sven Albrecht,
Michael Görner,
Joachim Hertzberg,
and Jianwei Zhang,
Autonomous Transparent Object Reconstruction,
DGR Days (Deutsche Gesellschaft für Robotik), 2016, Leipzig, Germany,.
[PDF]
2015
-
Michael Görner,
Autonomous Tabletop Object Learning,
Master Thesis, 2015, Osnabrück University.
[PDF]
2012
-
Michael Görner,
Integration of pseudo-Boolean constraint learning in a state-of-the-art Conflict-Driven Answer Set Solver,
Bachelor Thesis, 2012, Universität Potsdam.
[PDF]
Events
Day-long Workshop Handy Moves: Dexterity in Multi-Fingered Hands at ICRA 2025

Together with colleagues from TUM, Northwestern, Carnegie Mellon, UC Berkeley, and Texas A&M, I co-organize the workshop on Multi-Fingered Robotic Manipulation.
- Website: https://sites.google.com/view/dexterity-workshop-icra2025/
- OpenReview: Link
Day-long Workshop on MoveIt at ROS-I Fall Workshop 2019, October 9th

Henning Kayser, a former student of mine and co-maintainer of MoveIt, and I were invited to Stuttgart to hold a workshop on Motion and Manipulation Planning with MoveIt. More details can be found in the ROS-I blog post.
Workshop on Autonomous Robotics at the Interdisciplinary College 2019, March


Together with Jochen Sprickerhof, I got invited to present the field of autonomous robotics at this year's Interdisciplinary College in Günne.
Main focus of the workshop was the autonomous control of the Turtlebot2 robot platform. Participants experimented with the provided interfaces and their own idea to build a resilient and adaptive behavior. As a highlight, the programmed robots competed against each other on the last day of the workshop. All teams successfully integrated their ideas and provided a custom behavior. Congratulations to the clear winner!
Here is the link to the workshop website: Link.
World MoveIt! Day 2018, October 25th

Moving from city to city, this year Germany's World MoveIt! Day was hosted in Stuttgart. I was invited to coordinate the event there.
With 16 capable programmers, partially from various close-by companies, partially from academia, we spent the day working with MoveIt!. After some initial presentations, individual groups formed and worked on a variety of topics.
Read the full report here.
First Place at IROS 2018 Mobile Manipulation Hackathon

At this year's IROS in Madrid, PAL robotics hosted the robotics competition Mobile Manipulation Hackathon. The competition was designed to be very open and no concrete tasks were given. Instead, PAL sponsored a number of their TIAGo robot platforms for the event and participants had to propose their own example-scenario featuring their own research points.
We promised to present a mobile bartender setup serving drinks to thirsty engineers. After a few months of offline preparation, we visited PAL's laboratory in Barcelona for one week to implement everything on the real platform. After a lot of sleepless nights and hard work we managed to deliver the promised scenario as a live demo during the competition. The judges seemed impressed and awarded us a shared first place.
The overall setup included work on Human Perception, Object Pose Estimation, Ordering through Pointing Gestures on a Menu, Mobile Manipulation, and High-Level Task Coordination. Check out the competition video.Mentoring Google Summer Of Code in MoveIt!, Summer 2018
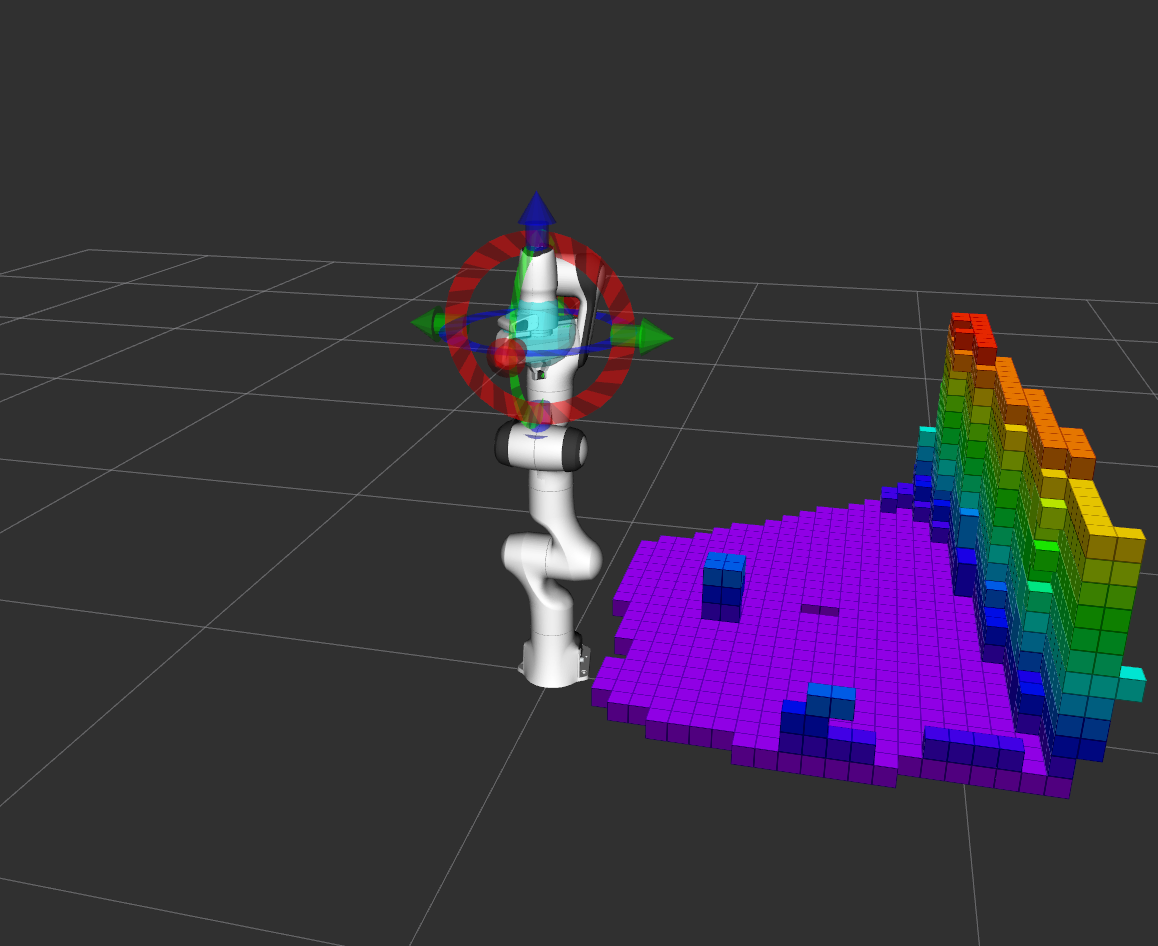
This year, I was involved as a Mentor for MoveIt!'s GSoC project and supervised Ridhwan Luthra. The goal of his work was improve the documentation and current state of MoveIt's Perception support.
In the process he fixed a number of bugs with the current system and implemented a perception tutorial illustrating an intuitive workflow often used in practice.
Read the report here.
World MoveIt! Day 2017, October 18th


After the tremendous success last year, we organized the World MoveIt! Day again this year.
This year, we hosted the German event in Munich at Magazino and I was invited to supervise it there. They are a group of hard-working engineers actually deploying autonomous systems in the wild and maintaining the systems online. The ROS-community should be grateful for all the experience they contribute back in numerous patches and open projects.
After a number of overview presentations in the morning, we started working on individual issues. With overall 13 gifted roboticists around, we managed to resolve a number of long-standing issues in the framework. Thanks everyone!
Read the full report here.
World MoveIt! Day 2016, August 23rd

This was the first time the MoveIt! community organized a worldwide World MoveIt! Day event. We aimed to get together to exchange insights and future perspectives as well as resolve as many known problems as possible.
I was invited to organize the German World MoveIt! Day in Münster this year. The event was hosted by Xamla Robotics Team at Provisio GmbH in Münster. It was a tremendously productive event with nine brillient robotics engineers at our location, overall the event resolved 65 Pull-requests.
Read the full report here.
Workshop on Hands-On Autonomous Robotics at IK2016, March 4th-11th
Together with my colleague and former mentor Jochen Sprickerhof, we were invited to organize a Workshop at the Interdisciplinary College 2016.
We introduced participants to the area of mobile autonomous robots, creating 2D and 3D maps of the environment and implementing simple navigation algorithms to follow human operators.
The workshop-specific website is hosted here.Lectures
Summer Semester 2024
Winter Semester 2023/24
Summer Semester 2023
Winter Semester 2022/23
Summer Semester 2022
Winter Semester 2021/22
Winter Semester 2020/21
- 64-424 Lecture Intelligent Robotics
Winter Semester 2019/20
Summer Semester 2019
Winter Semester 2018/19
- 64-424 Lecture Intelligent Robotics
- 64-156 Praktikum Mobile Roboter
- 64-450 Masterproject Intelligent Robotics (Part 2)
Summer Semester 2018
Winter Semester 2017/18
- 64-424 Lecture Intelligent Robotics
- 64-156 Praktikum Mobile Roboter
- 64-450 Masterproject Intelligent Robotics (Part 2)
Summer Semester 2017
Winter Semester 2016/17
- 64-424 Lecture Intelligent Robotics
- 64-156 Praktikum Mobile Roboter
- 64-450 Masterproject Intelligent Robotics (Part 2)
Summer Semester 2016
Winter Semester 2016
- At Interdisciplinary College 2016 (IK16) - Hands-On autonomous Robotics
Supervised Theses
-
Florian Stiefel,
Multimodal active speaker detection: from design to deployment,
Masterthesis, März 2025.
-
Fabian Wieczorek,
Data Augmentation in Offline Reinforcement Learning for Robotic Dough Shaping,
Masterthesis, August 2024.
[PDF] -
Björn Sygo,
Bimanual Robot-To-Robot Handover Utilizing Multi-Modal Feedback,
Masterthesis, March 2024.
[PDF] -
Jonas Tietz,
Optimal Robot Human Handover Velocity,
Masterthesis, April 2021.
[PDF] -
Tobias Krüger,
Locating the Source of a WLAN Signal using Multiple Robots and Dec-POMDP planning,
Bachelorthesis, August 2020.
[PDF] -
Judith Hartfill,
Feature-Based Monte Carlo Localization in the RoboCup Humanoid Soccer League,
Masterthesis, September 2019.
[PDF] -
Benjamin Scholz,
Playing Piano with a Shadow Dexterous Hand,
Masterthesis, September 2019.
[PDF] -
Ronja Güldenring,
Applying Deep Reinforcement Learning in the Navigation of Mobile Robots in Static and Dynamic Environments,
Masterthesis, April 2019.
[PDF] -
Lars Henning Kayser,
Predictive Planning with Self-Explored Push Dynamics,
Masterthesis, August 2018.
[PDF] -
Jeremias Kornelius Hartz,
Adaptive Pouring of Liquids Based on Human Motions Using a Robotic Arm,
Masterthesis, July 2018.
[PDF] -
Yannick Jonetzko,
Tactile-based grasping with the biomimetic sensors BioTac and the Shadow Dexterous Hand,
Masterthesis, November 2017.
[PDF] -
Kolja Poreski,
Autonomous Docking with Optical Positioning,
Bachelorthesis, April 2016.
[PDF]