
#include <bhmotorext.h>
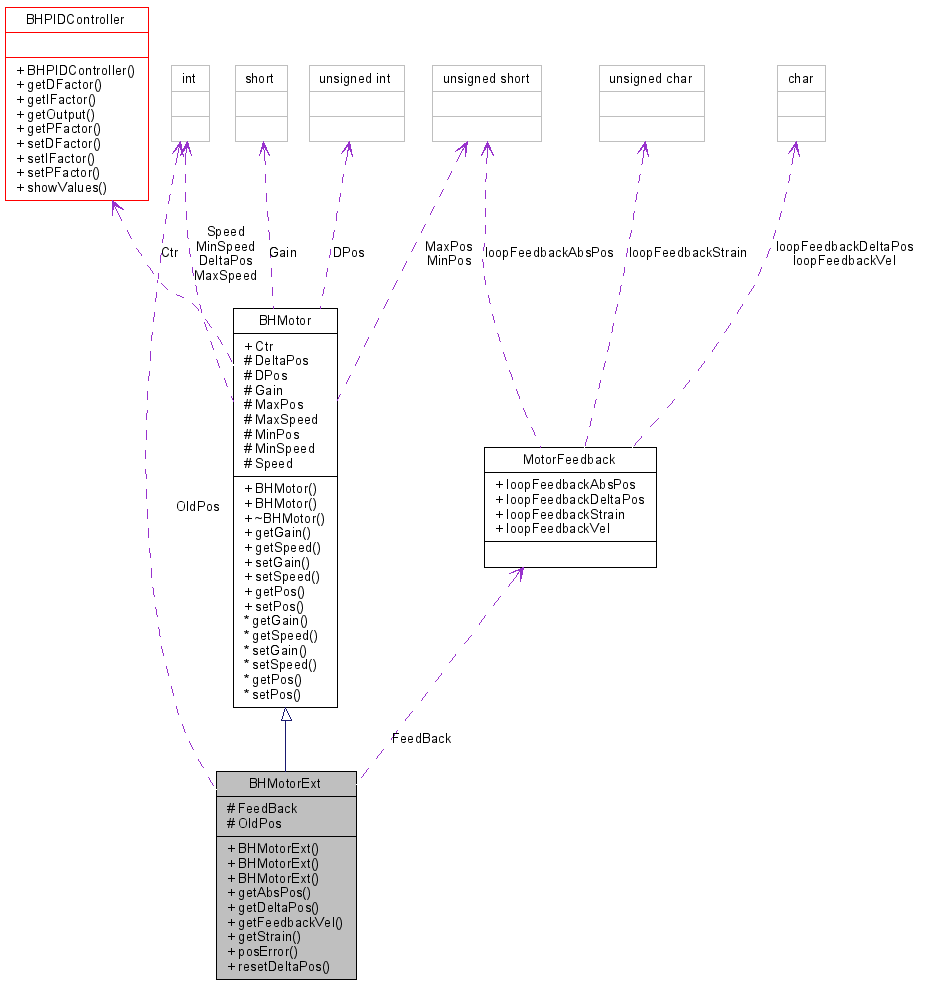
Inheritance diagram for BHMotorExt:
Public Member Functions | |
| BHMotorExt (MotorFeedback *mf, int speed) | |
| Constructor with speed setting. | |
| BHMotorExt (MotorFeedback *mf) | |
| Constructor for BHMotorExt object. | |
| BHMotorExt () | |
| Default constructor. DO NOT USE IT ! | |
| int | getAbsPos () const |
| Returns Motors absolute position. | |
| int | getDeltaPos () const |
| Returns Motors delta position. | |
| int | getFeedbackVel () const |
| Returns Motors feedback velocity. | |
| int | getStrain () const |
| Returns Motors Strain value. | |
| int | posError () const |
| void | resetDeltaPos () |
| Sets the DeltaPos value to zero. | |
Protected Attributes | |
| MotorFeedback * | FeedBack |
| BHMotorExt::BHMotorExt | ( | ) | [inline] |
Default constructor. DO NOT USE IT !
Only provided for inheriatance reasons.
| BHMotorExt::BHMotorExt | ( | MotorFeedback * | mf | ) | [inline] |
Constructor for BHMotorExt object.
| mf | MotorFeedback pointer, for force and position computation in rt mode |
| BHMotorExt::BHMotorExt | ( | MotorFeedback * | mf, | |
| int | speed | |||
| ) | [inline] |
Constructor with speed setting.
Constroucts an object with the given speed.
| mf | MotorFeedback pointer, for force and position computation in rt mode | |
| speed | Speed for finger |
| int BHMotorExt::getAbsPos | ( | ) | const [inline] |
Returns Motors absolute position.
Returns the loopFeedbackAbsPos value from the FeedBack.
To get the value of the desired position use BHMotor::getPos() const
WARNING If the bit for receiving this block in rtMode you get false values!
| int BHMotorExt::getDeltaPos | ( | ) | const [inline] |
Returns Motors delta position.
Returns the loopFeedbackDeltaPos value from the FeedBack.
WARNING If the bit for receiving this block in rtMode you get false values!
| int BHMotorExt::getFeedbackVel | ( | ) | const [inline] |
Returns Motors feedback velocity.
Returns the loopFeedbackVel value from the FeedBack.
WARNING: If the bit for receiving this block in rtMode you get false values!
WARNING: The range of this value is from -127 to 127. If the real speed of a motor is higher than 127, you will receive negative value although you are moving with positiv speed. This happens if the speed you send multipled by gain and PropVelCoeff is greater than 127 (what happens very fast!).
| int BHMotorExt::getStrain | ( | ) | const [inline] |
Returns Motors Strain value.
Returns the loopFeedbackStrain value from the FeedBack.
WARNING If the bit for receiving this block in rtMode you get false values!
| int BHMotorExt::posError | ( | ) | const [inline] |
Computes the position error of the finger.
I.E returned value is DPos - FeedBack.loopFeedbackAbsPos. FeedBack will not be updated by this function.
| void BHMotorExt::resetDeltaPos | ( | ) | [inline] |
Sets the DeltaPos value to zero.
MotorFeedback* BHMotorExt::FeedBack [protected] |
Pointer to feedback information
|
|
Generated Wed Aug 16 15:00:06 2006 by
|