
#include <bhandext.h>
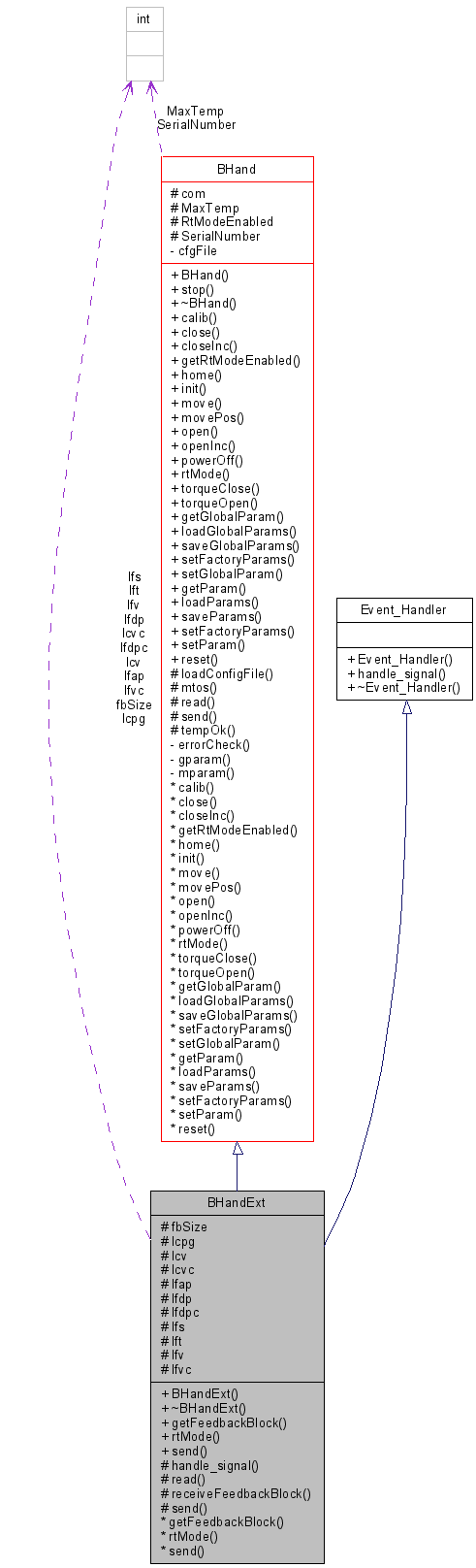
Inheritance diagram for BHandExt:
Public Member Functions | |
| BHandExt (const std::string devName) | |
| Constructor for class BHandExt. | |
Real-Time Mode commands | |
If you set the BarrettHand to real-time Mode, these commands can be used to controll it. | |
| FeedbackBlock | getFeedbackBlock () throw (BHandException) |
| Returns a FeedbackBlock without sending any control data. | |
| void | rtMode (const Motors motors) |
| Enters realtime mode for the specified motors. | |
| FeedbackBlock | send (ControlBlock cb) throw (BHandException) |
| Sends a control block to the BarrettHand. | |
This class provides features for easy control of the BarrettHand in Realtime-Mode.
| BHandExt::BHandExt | ( | const std::string | devName | ) |
Constructor for class BHandExt.
| devName | Name for the device the BarrettHand is connected to (e.g. /dev/ttyS0). |
| FeedbackBlock BHandExt::getFeedbackBlock | ( | ) | throw (BHandException) |
| void BHandExt::rtMode | ( | const Motors | motors | ) |
Enters realtime mode for the specified motors.
| motors | motors for which realtime mode should be entered |
Reimplemented from BHand.
| FeedbackBlock BHandExt::send | ( | ControlBlock | cb | ) | throw (BHandException) |
Sends a control block to the BarrettHand.
| cb | ControlBlock containing control data for the hand. |
|
|
Generated Wed Aug 16 14:58:41 2006 by
|