#include <bhandext.h>
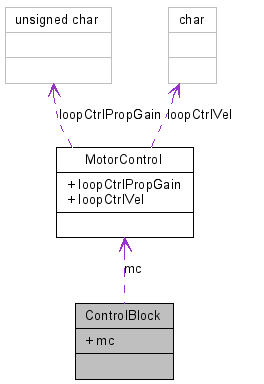
Collaboration diagram for ControlBlock:
Field for MotorControl for each of the four motors