
#include <bhand.h>
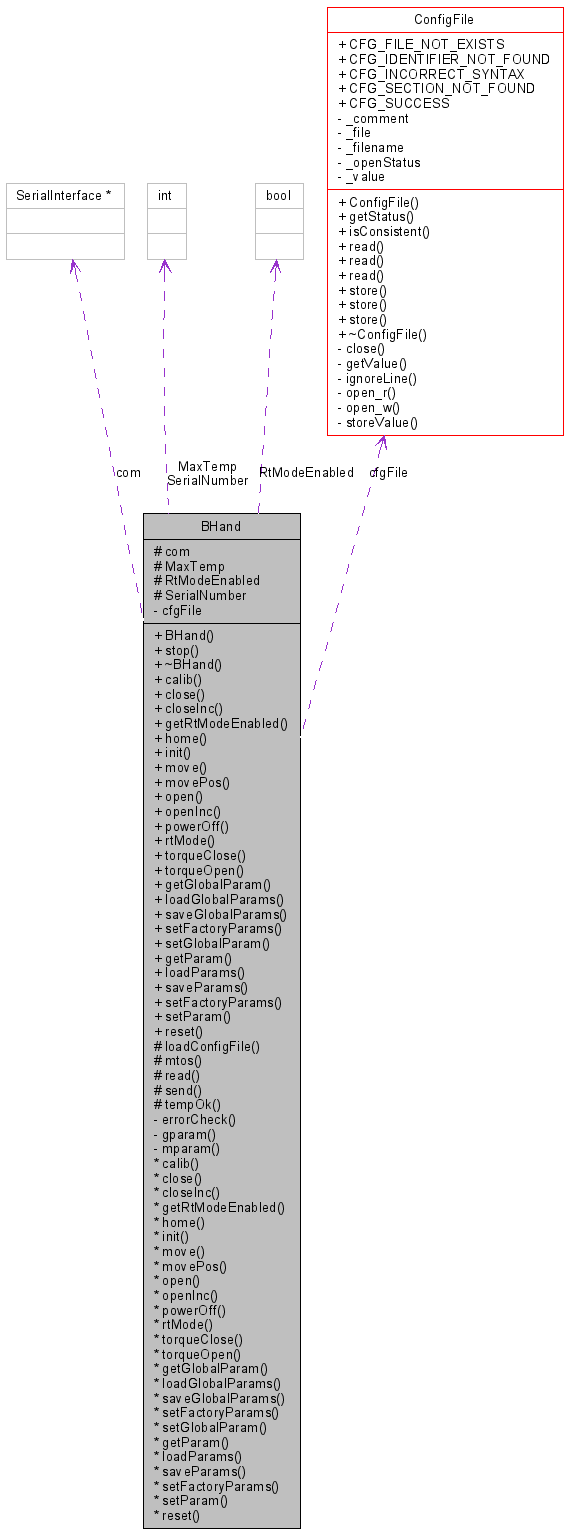
Inheritance diagram for BHand:
Public Member Functions | |
| BHand (const std::string devName) | |
| Constructor for class BarrettHand. | |
| void | stop () |
| Aborts current motion and returns to supervisory mode when in real time mode. | |
| ~BHand () | |
| Destructor for class BarrettHand. | |
Movement Commands | |
Movement commands are motor commands: they immediately affect one or more of the motors. Each can take motor parameters. | |
| void | calib (const Motors motors=ALL) throw (BHandException) |
| Calibrates the selected motor controller(s), preparing them for use by other movement commands. | |
| void | close (const Motors motors) throw (BHandException) |
| Commands the selected motor(s) to move fingers in close direction with a velocity ramp-down at target limit. If selected, each finger moves towards the palm, and the spread motor moves so that fingers F1 and F2 are adjacent to finger F3. | |
| void | closeInc (const Motors motors, const unsigned int distance) throw (BHandException) |
| Closes the selected motor(s) the given number of counts. | |
| bool | getRtModeEnabled () |
| Returns if real Time mode is enabled. | |
| void | home (const Motors motors) throw (BHandException) |
| Moves the selected motor(s) to position 0. | |
| void | init () throw (BHandException) |
| Initializes the communication with the BarrettHand setting the baud rate to 38400 and other required preferences for the serial port. | |
| void | move (const Motors motors, const int distance) throw (BHandException) |
| Opens(-) or closes(+) the selected motor(s) the given number of counts. | |
| void | movePos (const Motors motors, const unsigned int pos) throw (BHandException) |
| Moves the selected motor(s) to the given position. | |
| void | open (const Motors motors) throw (BHandException) |
| Commands the selected motor(s) to move fingers in open direction with a velocity ramp-down at target limits. | |
| void | openInc (const Motors motors, const unsigned int distance) throw (BHandException) |
| Opens the selected motor(s) the given number of counts. | |
| void | powerOff (const Motors motors) throw (BHandException) |
| Turns the selected motor(s)'s power off. | |
| void | rtMode (const Motors motors) throw (BHandException) |
| Enters real Time mode. | |
| void | torqueClose (const Motors motors) throw (BHandException) |
| Commands velocity of selected motor(s) in the direction that closes the finger(s) with control of motor torque at stall. | |
| void | torqueOpen (const Motors motors) throw (BHandException) |
| Commands velocity of selected motor(s) in the direction that opens the finger(s) with control of motor torque at stall. | |
Global parameter commands | |
Global parameter commands configure the hand as a whole, without referencing a particular finger or motor. | |
| unsigned int | getGlobalParam (const GParameter param) throw (BHandException) |
| Gets the given parameter's value. | |
| void | loadGlobalParams () throw (BHandException) |
| Loads the global parameters from a file. | |
| void | saveGlobalParams () throw (BHandException) |
| Saves the global parameters to a file. | |
| void | setFactoryParams () throw (BHandException) |
| Sets the writable global parameters back to their factory default values. | |
| void | setGlobalParam (const GParameter param, const unsigned int value) throw (BHandException) |
| Sets the given parameter to the given value. | |
Motor parameter commands | |
Motor parameter commands act on the configuration parameters for one or more of the motors. | |
| unsigned int | getParam (const int motor, const MParameter param) throw (BHandException) |
| Gets the given parameter's value for the selected motor. | |
| void | loadParams () throw (BHandException) |
| Loads the motor parameters from a file. | |
| void | saveParams () throw (BHandException) |
| Saves the motor parameters to a file. | |
| void | setFactoryParams (const Motors motors) throw (BHandException) |
| Sets the selected motor(s)'s parameters back to their factory default values. | |
| void | setParam (const Motors motors, const MParameter param, const unsigned int value) throw (BHandException) |
| Sets the given parameter to the given value for the selected motor(s). | |
Administrative commands | |
Administrative commands implement various housekeeping functions. | |
| void | reset () throw (BHandException) |
| Resets the hand software. Equivalent to doing a power cycle. | |
Protected Member Functions | |
| void | loadConfigFile () |
| loas the configfile corresponding to the given serial number | |
Protected Attributes | |
| int | MaxTemp |
| bool | RtModeEnabled |
This class is an encapsulation of the basic features of the GCL Protocol.
| BHand::BHand | ( | const std::string | devName | ) |
Constructor for class BarrettHand.
| devName | Name for the device the BarrettHand is connected to (e.g. /dev/ttyS0). |
| BHand::~BHand | ( | ) |
Destructor for class BarrettHand.
All movement is stopped and the serial connection to the BarrettHand is closed.
| void BHand::calib | ( | const Motors | motors = ALL |
) | throw (BHandException) [inline] |
Calibrates the selected motor controller(s), preparing them for use by other movement commands.
calib() must be run before any other movement command if the hand was not calibrated outside of the library. Generally it is run without a motor prefix, calibrating all four motors; although, if desired, a subset of the motors can be specified. After an calib() call, all motors are in their home position; at 0 encoder counts.
| motors | motors to initialize (default: ALL) |
| void BHand::close | ( | const Motors | motors | ) | throw (BHandException) [inline] |
Commands the selected motor(s) to move fingers in close direction with a velocity ramp-down at target limit. If selected, each finger moves towards the palm, and the spread motor moves so that fingers F1 and F2 are adjacent to finger F3.
The close() command is similar to a movePos() command, with the value of the Close Target (CT) motor parameter as the destination. However, unlike the movePos() command, the close() command will not return an ERR32 if it does not reach CT within the maximum position error (MPE) parameter.
| motors | motors to move |
| void BHand::closeInc | ( | const Motors | motors, | |
| const unsigned int | distance | |||
| ) | throw (BHandException) [inline] |
Closes the selected motor(s) the given number of counts.
| motors | motors to move | |
| distance | distance to move (0 to 20000) |
| unsigned int BHand::getGlobalParam | ( | const GParameter | param | ) | throw (BHandException) |
Gets the given parameter's value.
| param | global parameter to be queried |
| unsigned int BHand::getParam | ( | const int | motor, | |
| const MParameter | param | |||
| ) | throw (BHandException) |
Gets the given parameter's value for the selected motor.
Note: Only a single motor is accepted as parameter. If more than one motor is given, that one with the lowest number is used.
| motor | single motor for which parameter is requested | |
| param | motor parameter to be queried |
| bool BHand::getRtModeEnabled | ( | ) | [inline] |
Returns if real Time mode is enabled.
| void BHand::home | ( | const Motors | motors | ) | throw (BHandException) [inline] |
Moves the selected motor(s) to position 0.
| void BHand::init | ( | ) | throw (BHandException) |
Initializes the communication with the BarrettHand setting the baud rate to 38400 and other required preferences for the serial port.
init() must be run before any other movement command.
Reimplemented in BHandForce, and BHandForceExt.
| void BHand::loadConfigFile | ( | ) | [protected] |
loas the configfile corresponding to the given serial number
| void BHand::loadGlobalParams | ( | ) | throw (BHandException) |
Loads the global parameters from a file.
| void BHand::loadParams | ( | ) | throw (BHandException) |
Loads the motor parameters from a file.
| void BHand::move | ( | const Motors | motors, | |
| const int | distance | |||
| ) | throw (BHandException) [inline] |
Opens(-) or closes(+) the selected motor(s) the given number of counts.
| motors | motors to move | |
| distance | distance to move (-20000 to 20000) |
Reimplemented in BHandForce, BHandForceExt, and BHandForceExtKin.
| void BHand::movePos | ( | const Motors | motors, | |
| const unsigned int | pos | |||
| ) | throw (BHandException) [inline] |
Moves the selected motor(s) to the given position.
| motors | motors to move | |
| pos | position where to move (0 to 20000) |
Here is the call graph for this function:

| void BHand::open | ( | const Motors | motors | ) | throw (BHandException) [inline] |
Commands the selected motor(s) to move fingers in open direction with a velocity ramp-down at target limits.
If selected, F1, F2, and F3 open away from the palm, and the spread motor moves so that fingers F1 and F2 are opposite finger F3.
The open() command is similar to a movePos() command, with the value of the OT motor parameter as the destination. However, unlike the movePos() command, the open() command will not return an ERR32 if it does not reach OT within the maximum position error (MPE) parameter.
| motors | motors to move |
| void BHand::openInc | ( | const Motors | motors, | |
| const unsigned int | distance | |||
| ) | throw (BHandException) [inline] |
Opens the selected motor(s) the given number of counts.
| motors | motors to move | |
| distance | distance to move (0 to 20000) |
| void BHand::powerOff | ( | const Motors | motors | ) | throw (BHandException) [inline] |
Turns the selected motor(s)'s power off.
| motors | motors that should be turned off |
| void BHand::reset | ( | ) | throw (BHandException) [inline] |
Resets the hand software. Equivalent to doing a power cycle.
| void BHand::rtMode | ( | const Motors | motors | ) | throw (BHandException) [inline] |
Enters real Time mode.
If Hand is already in real Time Mode nothing will happen!
Reimplemented in BHandExt.
| void BHand::saveGlobalParams | ( | ) | throw (BHandException) |
Saves the global parameters to a file.
| void BHand::saveParams | ( | ) | throw (BHandException) |
Saves the motor parameters to a file.
| void BHand::setFactoryParams | ( | ) | throw (BHandException) [inline] |
Sets the writable global parameters back to their factory default values.
| void BHand::setFactoryParams | ( | const Motors | motors | ) | throw (BHandException) [inline] |
Sets the selected motor(s)'s parameters back to their factory default values.
| motors | motors for which parameters should be set |
| void BHand::setGlobalParam | ( | const GParameter | param, | |
| const unsigned int | value | |||
| ) | throw (BHandException) [inline] |
Sets the given parameter to the given value.
| param | global parameter to be set | |
| value | value for global parameter |
| void BHand::setParam | ( | const Motors | motors, | |
| const MParameter | param, | |||
| const unsigned int | value | |||
| ) | throw (BHandException) [inline] |
Sets the given parameter to the given value for the selected motor(s).
| motors | motors for which the parameters should be set | |
| param | motor parameter to be set | |
| value | value for motor paramter |
| void BHand::stop | ( | ) | [inline] |
Aborts current motion and returns to supervisory mode when in real time mode.
| void BHand::torqueClose | ( | const Motors | motors | ) | throw (BHandException) [inline] |
Commands velocity of selected motor(s) in the direction that closes the finger(s) with control of motor torque at stall.
| motors | motors to move |
| void BHand::torqueOpen | ( | const Motors | motors | ) | throw (BHandException) [inline] |
Commands velocity of selected motor(s) in the direction that opens the finger(s) with control of motor torque at stall.
| motors | motors to move |
int BHand::MaxTemp [protected] |
Maximal allowed Temperature for Hand
bool BHand::RtModeEnabled [protected] |
Contains weather real Time mode is enabled or not.
|
|
Generated Wed Aug 16 14:58:35 2006 by
|