
#include <bhmotor.h>
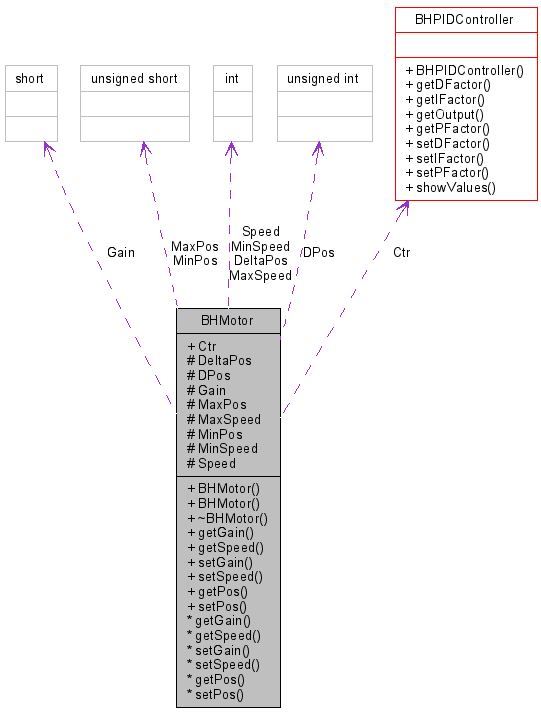
Inheritance diagram for BHMotor:
Public Member Functions | |
| BHMotor (int speed) | |
| Constructor with speed setting. | |
| BHMotor () | |
| Constructor for BHMotor object. | |
| virtual | ~BHMotor () |
| Destructotr. | |
Speed commands | |
These commands can be used to get and set the speed for a motor. They don't get and set the real but the desired speed. | |
| int | getGain () const |
| Returns the Gain value for the motor. | |
| int | getSpeed () const |
| Returns the (desired) speed for the Motor. | |
| void | setGain (const short gain) |
| Sets the gain value for the motor. | |
| void | setSpeed (const int speed) throw (BHMotorException) |
| Method sets the speed for the next movement of the finger. | |
Position commands | |
These commands can be used to get and set the position for a motor . They don't get and set the real but the desired position. | |
| int | getPos () const |
| Returns the (desired) positon of the finger. | |
| void | setPos (const unsigned int pos) throw (BHMotorException) |
| Sets the (desired) position of the finger. | |
Data Fields | |
| BHPIDController * | Ctr |
Protected Attributes | |
| unsigned int | DPos |
| short | Gain |
| unsigned short | MaxPos |
| int | MaxSpeed |
| unsigned short | MinPos |
| int | MinSpeed |
| int | Speed |
| BHMotor::BHMotor | ( | ) | [inline] |
Constructor for BHMotor object.
| BHMotor::BHMotor | ( | int | speed | ) |
Constructor with speed setting.
Constroucts a BHMotor Object with the given speed.
| speed | Speed for finger |
| BHMotor::~BHMotor | ( | ) | [inline, virtual] |
Destructotr.
| int BHMotor::getGain | ( | ) | const [inline] |
Returns the Gain value for the motor.
| int BHMotor::getPos | ( | ) | const [inline] |
Returns the (desired) positon of the finger.
| int BHMotor::getSpeed | ( | ) | const [inline] |
Returns the (desired) speed for the Motor.
| void BHMotor::setGain | ( | const short | gain | ) | [inline] |
Sets the gain value for the motor.
The speed value is multiplied with gain and PropVelCoeff to determine the effective speed. The gain value is only use with the gain movement commands in BHandForce::moveG(const Motors motors, const int position[4]) .
| gain | Gain value for motor. |
| void BHMotor::setPos | ( | const unsigned int | pos | ) | throw (BHMotorException) [inline] |
Sets the (desired) position of the finger.
| pos | Position of the finger. |
Reimplemented in BHFinger.
| void BHMotor::setSpeed | ( | const int | speed | ) | throw (BHMotorException) [inline] |
Method sets the speed for the next movement of the finger.
| speed | Speed of finger |
controller to adjust position
Reimplemented in BHSpread.
unsigned int BHMotor::DPos [protected] |
Desired position of finger.
short BHMotor::Gain [protected] |
Gain of finger.
unsigned short BHMotor::MaxPos [protected] |
Maximal allowed speed for motor
int BHMotor::MaxSpeed [protected] |
Maximal allowed speed for motor
unsigned short BHMotor::MinPos [protected] |
Minmal allowed position for motor
int BHMotor::MinSpeed [protected] |
Minmal allowed speed for motor
int BHMotor::Speed [protected] |
Speed of finger.
|
|
Generated Wed Aug 16 14:59:57 2006 by
|