#include <aibocam.h>
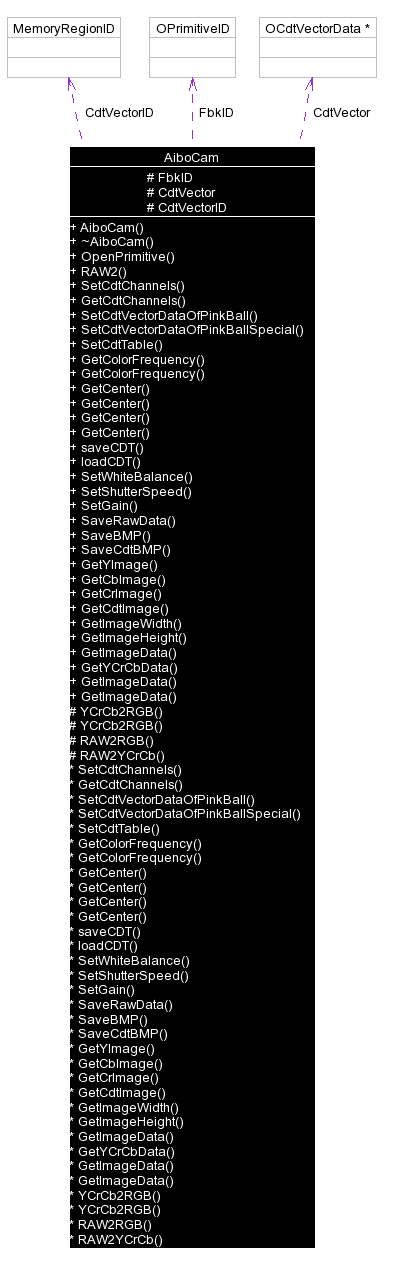
Collaboration diagram for AiboCam:
Public Member Functions | |
| AiboCam () | |
| virtual | ~AiboCam () |
| void | OpenPrimitive () |
| void | RAW2 (byte *outImage, byte *rawImage, const int width, const int height, const LAYER l) const |
| Functions converts an raw image in the format you want to. The Raw Image data of the Aibo has a format like :. | |
Methods for manipulation of the CDT (ColorDetectionTable) data | |
| void | SetCdtChannels (const int numChannels) |
| int | GetCdtChannels () const |
| void | SetCdtVectorDataOfPinkBall (const int channel=0) |
| void | SetCdtVectorDataOfPinkBallSpecial (const int channel=0) |
| void | SetCdtTable (const int channel, const CdtData table[32]) |
| int | GetColorFrequency (OFbkImageVectorData *imageVec, const int channel=0) |
| int | GetColorFrequency (OFbkImageVectorData *imageVec, const OCdtChannel channel=ocdtCHANNEL0) |
| bool | GetCenter (OFbkImageVectorData *imageVec, int cdtChannel, int &xCenter, int &yCenter) |
| Gives the center of an region tracked with a CDT. | |
| bool | GetCenter (OFbkImageVectorData *imageVec, int cdtChannel, int *xCenter, int *yCenter) |
| Gives the center of an region tracked with a CDT. | |
| bool | GetCenter (const OFbkImage &cdtImage, const int cdtChannel, int *xCenter, int *yCenter) |
| Gives the center of an region tracked with a CDT. | |
| bool | GetCenter (const OFbkImage &cdtImage, const OCdtChannel &cdtChannel, int *xCenter, int *yCenter) |
| Gives the center of an region tracked with a CDT. | |
| void | saveCDT (char *fileName, CdtData cdt[32]) const |
| CdtData * | loadCDT (char *fileName) |
Methods for camera parameters | |
| void | SetWhiteBalance (WHITE_BALANCE balance) |
| void | SetShutterSpeed (SHUTTER_SPEED speed) |
| void | SetGain (CAM_GAIN gain) |
Methods for saving images on memstick | |
| void | SaveRawData (char *path, OFbkImageVectorData *imageVec, const OFbkImageLayer layer) const |
| void | SaveBMP (char *path, OFbkImageVectorData *imageVec, const OFbkImageLayer layer) const |
| void | SaveCdtBMP (char *basepath, OFbkImageVectorData *imageVec) const |
Methods for accessing the image data | |
| OFbkImage | GetYImage (OFbkImageVectorData *imageVec, const OFbkImageLayer layer) |
| OFbkImage | GetCbImage (OFbkImageVectorData *imageVec, const OFbkImageLayer layer) |
| OFbkImage | GetCrImage (OFbkImageVectorData *imageVec, const OFbkImageLayer layer) |
| OFbkImage | GetCdtImage (OFbkImageVectorData *imageVec) |
| int | GetImageWidth (OFbkImage *image) const |
| Returns width of an image. | |
| int | GetImageHeight (OFbkImage *image) const |
| Returns height of Image. | |
| byte * | GetImageData (OFbkImageVectorData *imageVec, const OFbkImageLayer layer) |
| gives a pointer to the raw image data | |
| void | GetYCrCbData (byte *ycrcbImage, OFbkImageVectorData *imageVec, const OFbkImageLayer layer) const |
| copies the ycrcb image data from a raw into a ycrcb image | |
| byte * | GetImageData (OFbkImage *image) |
| copies the ycrcb image data from a raw into a ycrcb imageReturns a byte pointer to the raw image data | |
| byte * | GetImageData (const OFbkImage &image) |
Protected Member Functions | |
Functions for image conversion | |
| void | YCrCb2RGB (byte y, byte cr, byte cb, byte *r, byte *g, byte *b) const |
| converts a ycrcb tripel into rgb triple | |
| void | YCrCb2RGB (byte *rgbImage, byte *ycrcbImage, const int width, const int height) const |
| Functions converts an YCrCb (888) image in a RGB (888) image. | |
| void | RAW2RGB (byte *rgbImage, byte *rawImage, const int width, const int height) const |
| Functions converts an raw image in a RGB (888) image. | |
| void | RAW2YCrCb (byte *ycrcbImage, byte *rawImage, const int width, const int height) const |
| Functions converts an raw image in a YCrCB(888) image. | |
Protected Attributes | |
| OPrimitiveID | FbkID |
| OCdtVectorData * | CdtVector |
| MemoryRegionID | CdtVectorID |
cam/Makefile, and CamExample.h.
|
|
Default constructor |
|
|
Default destructor |
|
|
Method to initialize the FbkID
|
|
|
Sets the number of CDT Channels in CdtVectorData Channel data has to be set first
|
|
|
Returns the number of CDT Channels in CdtVectorData
|
|
|
Method sets the first channel of the segmentation unit (CDT = color detection table) to the color of the pink ball.
|
|
|
|
|
||||||||||||
|
Initializes and sets the Cdt for a given channel. You have to use SetCdtChannels(const int numChannels) to enable tracking.
|
|
||||||||||||
|
Returns the color frequency (pixel number/16), which was detected with the CDT of the given channel
Here is the call graph for this function:  |
|
||||||||||||
|
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Gives the center of an region tracked with a CDT.
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Gives the center of an region tracked with a CDT.
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Gives the center of an region tracked with a CDT.
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Gives the center of an region tracked with a CDT.
|
|
||||||||||||
|
Writes the data of the cdt as a file on the memorystick of the aibo in fileName
|
|
|
Loads a CDT form memorystick
|
|
|
Sets the white balance of the camera
|
|
|
Sets the shutter speed of the camera
|
|
|
Sets the gain of the camera
|
|
||||||||||||||||
|
Method to save the raw image data on memorystick
|
|
||||||||||||||||
|
Writes the image in the given format on memstick
Here is the call graph for this function:  |
|
||||||||||||
|
Writes all of the valid cdt images on memstick
Here is the call graph for this function:  |
|
||||||||||||
|
Returns the YImage of the give layer
|
|
||||||||||||
|
Returns the CbImage of the give layer
|
|
||||||||||||
|
Returns the CrImage of the give layer
|
|
|
Returns the CDTImage (all in one)
|
|
|
Returns width of an image.
|
|
|
Returns height of Image.
|
|
||||||||||||
|
gives a pointer to the raw image data
|
|
||||||||||||||||
|
copies the ycrcb image data from a raw into a ycrcb image
Here is the call graph for this function:  |
|
|
copies the ycrcb image data from a raw into a ycrcb imageReturns a byte pointer to the raw image data
|
|
|
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. |
|
||||||||||||||||||||||||
|
Functions converts an raw image in the format you want to.
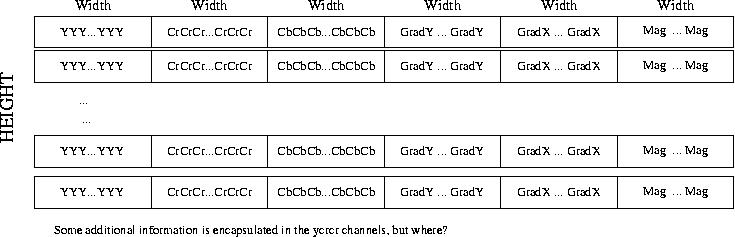
The rawimage layout
|
|
||||||||||||||||||||||||||||
|
converts a ycrcb tripel into rgb triple
|
|
||||||||||||||||||||
|
Functions converts an YCrCb (888) image in a RGB (888) image.
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Functions converts an raw image in a RGB (888) image.
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Functions converts an raw image in a YCrCB(888) image.
|
|
|
Primitive ID of the camera |
|
|
OCdtVector for the camera |
|
|
ID for CdtVector |
|
|
Generated Thu Jan 19 11:55:07 2006 by
|