
Research Projects
The group TAMS is involved in several research projects and cooperates with national and international universities and companies.Crossmodal Learning
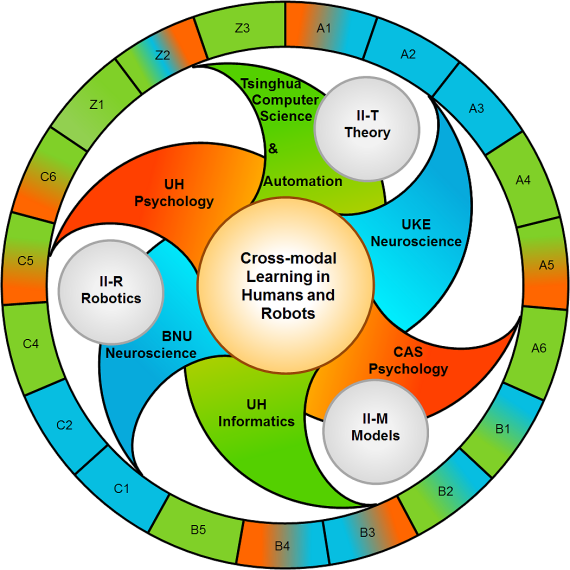
"The term crossmodal learning refers to the adaptive, synergistic synthesis of complex perceptions from multiple sensory modalities, such that the learning that occurs within any individual sensory modality can be enhanced with information from one or more other modalities. Crossmodal learning is crucial for human understanding of the world, and examples are ubiquitous, such as: learning to grasp and manipulate objects; learning to walk; learning to read and write; learning to understand language and its referents; etc. In all these examples, visual, auditory, somatosensory or other modalities have to be integrated, and learning must therefore be crossmodal." website
DEXMAN: Improving robot’s DEXterous MANipulability by learning stiffness-based human motor skills and visuo-tactile exploration
DEXMAN is an international collaborative research project hold by three partners: Universität Hamburg, Universität Bielefeld, and South China University of Technology, together founded by DFG (Germany) and NSFC (China). The goal of DEXMAN is to develop learning and control approaches based on multimodal data to improve the ability of robot dexterous and compliant manipulation.
[more information]
Development of a Camera Based Monitoring System for 3D-Printed Electronics (KamEl)
ZIM-KamEl is a joint project together with Neotech AMT, a leading manufacturer of manufacturing technologies for 3D Printed Electronics. The project, funded by Central Innovation Program for SMEs (ZIM) from the German Federal Federal Ministry for Economic Affairs and Energy (BMWi), will run until September 2022. Automated Quality Assurance (QA) will be developed with which the manufacturing processes can be monitored online in the 5-axis manufacturing cell. [more information]
Ultra-layered perception with brain-inspired information processing for vehicle collision avoidance
The ULTRACEPT project proposes an innovative solution with brain-inspired multiple layered and multiple modalities information processing
for trustworthy vehicle collision detection. It takes the advantages of low cost spatial-temporal and parallel computing capacity
of bio-inspired visual neural systems and multiple modalities data inputs in extracting potential collision cues at complex weather and lighting conditions.
The project, funded within the EU Horizon 2020 programme, will run until November 2022.
[more information]
Former Projects
Cross-modal Interaction in Natural and Artificial Cognitive Systems (CINACS)
CINACS is an international graduate colleg that investigates the
principles of cross-modal interactions in natural and cognitive systems
to implement them in artificial systems. Research will primarily consider
the three sensory systems vision, hearing and haptics. This project,
accomplished by the University of Hamburg and the University of Tsinghua,
Beijing, is funded by the DFG and the Chinese Ministry of Education.
[more information]
Robustness by Autonomous Competence Enhancement (RACE)
The overall aim of the RACE project is to develop an artificial cognitive system,
embodied by a service robot, able to build a high-level understanding of the
world it acts in by storing and exploiting appropriate memories of its
experiences. Experiences will be recorded internally at multiple levels:
high-level descriptions in terms of goals, tasks and behaviours as well as
constituting subtasks, and finally sensory and actuator skills at the lowest
level. In this way, experiences provide a detailed account of how the robot has
achieved past goals or how it has failed, and what sensory events have
accompanied the activities. The group TAMS is the coordinator of
this project.
The RACE Integrated Project is part of the EU's Seventh Framework Programme (FP7) and runs from 12/2011 until 11/2014. [more information] [poster1] [poster2]
The RACE Integrated Project is part of the EU's Seventh Framework Programme (FP7) and runs from 12/2011 until 11/2014. [more information] [poster1] [poster2]
A Modular Smart System for Infants’ Rehabilitation At Home based on Mechatronic Toys (CareToy)
The aim of the CareToy project is to exploit new ICT and mechatronic technologies to promote early intervention in the first year of life and to reinforce therapy initially performed in a high-competence medical institution by a portable low-cost instrumented setting tele-monitored by the medical centre, thus augmenting the medical effectiveness of the therapy while reducing the cost for the Healthcare Systems.
The development of an innovative smart system for rehabilitation of infants at home proposed is based on smart tools, like toys, usable in natural settings, such as the infants’ home, in a non-invasive and transparent way, to stimulate, monitor and measure infants’ rehabilitation.
The CareToy Project is part of the EU's Seventh Framework Programme (FP7) and runs from 11/2011 until 10/2014. [more information]
The CareToy Project is part of the EU's Seventh Framework Programme (FP7) and runs from 11/2011 until 10/2014. [more information]
Implementation and integration of advanced Robotic systems and intelligent Environments in real scenarios for the ageing population (Robot-Era)

The objective of the Robot-Era project is to develop, implement and demonstrate
the general feasibility, scientific/technical effectiveness
and social/legal plausibility and acceptability by end-users
of a plurality of complete advanced robotic services, integrated in intelligent environments,
which will actively work in real conditions and cooperate with real people
and between them to favour independent living, improve the quality of life
and the efficiency of care for elderly people.
The Robot-Era Integrated Project is part of the EU's Seventh Framework Programme (FP7) under contract 288899 and runs from 01/2012 until 12/2015. [more information], [project website]
The Robot-Era Integrated Project is part of the EU's Seventh Framework Programme (FP7) under contract 288899 and runs from 01/2012 until 12/2015. [more information], [project website]
Developmental Pathway towards Autonomy and Dexterity in Robot In-Hand Manipulation (HANDLE)

The HANDLE project aims at understanding how humans perform the manipulation
of objects in order to replicate grasping and skilled in-hand movements
with an anthropomorphic artificial hand.
The goal is to evolve robot grippers from current best practice towards
more autonomous, natural and effective articulated hands.
The project will focus both on technological developments and fundamental
multidisciplinary research in order to endow the proposed robotic hand
with advanced perception capabilities, high-level feedback control,
and elements of intelligence that allow recognition of objects and context.
The HANDLE Integrated Project is part of the EU's Seventh Framework Programme (FP7) and runs from 02/2009 until 01/2013. [more information]
The HANDLE Integrated Project is part of the EU's Seventh Framework Programme (FP7) and runs from 02/2009 until 01/2013. [more information]
Multistandard Integrated Network Convergence for Global Mobile and Broadcast Technologies (MING-T)
The goal of MING-T is to research, develop, prototype, integrate and
validate the interoperability and handover issues of the representative
mobile digital broadcast standards developed in China and Europe.
MING-T will address the issues of convergence between broadcast standards
and mobile communications network technologies. The MING-T Project is part
of the EU's sixth Framework Programme (FP6) for Research and
Technological Development.
[more information]
Intelligent and Accurate Vision-Systems to support Service Robots (IVUS)
Aim of the project IVUS is the development of a 3D-Vision System for the
use in service robots. The planned camera possesses an integrated processor
with high computing capability. Pictures of the environment are reduced to
symbolic values. Crucial is the acquisition of 3D-Information from pictures,
without the use of auxiliary sensors. The main processor of the service robot
is almost free of orientation tasks. Thus one important requirement for
real time navigation of the service robot is realised. The project is part
of the national research program Leitinitiative Servicerobotik
funded by the BMBF. [more information]
Promoting Access to Components, subsystems and microsystems Technologies for Industrial Competitiveness in Europe (EUROPRACTICE)
EUROPRACTICE is a European Commission initiative, funded by the EU
Information Society Technologies (IST), which is now also part of the
EU's Seventh Framework Programme (FP7). The aim is to improve the
competitiveness of European industry by the adoption of advanced electronics
technologies. EUROPRACTICE has become internationally recognised as a quality
brand name for European service-type projects in the Microsystems and
Microelectronics fields. [more information]
E-Learning-Consortium Hamburg (ELCH)
The E-Learning-Consortium Hamburg is a board of experts from several
university-level institutions in Hamburg.
The group TAMS accomplished three projects founded by the
E-Learning-Consortium:
Climbing Robots

We proposed two kinds of climbing robots recently. One is a lightweight smart
wall-climbing robot for rescue missions, which was developed as a flexible
mobile platform carrying a CCD camera and other sensors.
The second one is a new kind of pneumatic climbing robot to meet the
requirements of glass-wall cleaning for high-rise buildings. The robot is
actuated by pneumatic cylinders and attaches itself to walls with vacuum
suckers.
These projects are accomplished by the University of Hamburg and
Beijing University of Aeronautics and Astronautics.
[more information]
Service Robots
The main concern of our insitute's research work is to examine the
interaction of different modalities of sensory and cognitive systems
like vision, writing, hearing, talking, touching/feeling or grasping.
The interaction between people and technical information systems and
communication systems is directly related to mulitmodality. One main
focus of our work therefore is on applications in intelligent service
robotics.
There are several in-house projects like PhD, diploma and master theses
which study service robotics and man-machine interaction.
[more information]