
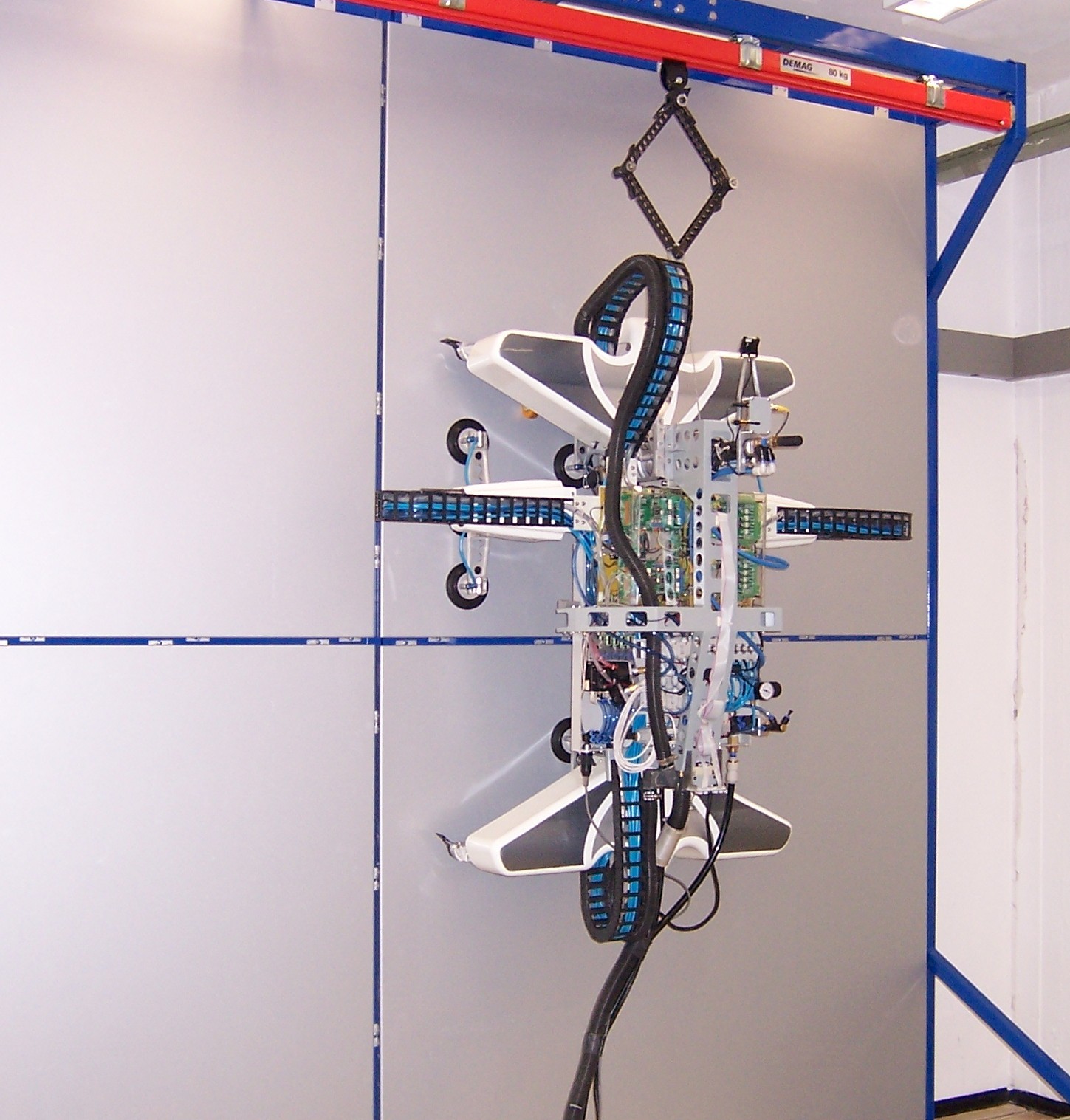
Sky cleaner IV
As the Technical coordinator of the project "Sky Cleaner 4- An improved climbing robotic platform for cleaning".
This project is implemented based on the coopertion between our TAMS group in Hamburg and Robotics Institute in Beihang University (BUAA).
Our lab has acquired a new kind of pneumatic climbing robot to meet the requirements of glass-wall cleaning for high-rise buildings. The robot is actuated by pneumatic cylinders and attaches itself to walls with vacuum suckers. These pneumatic actuators enabled the construction of a lightweight and dexterous robot. At the same time the pneumatically driven movement has the characteristic of passive compliance.
The major challenge in pneumatic systems is the ability to deal with hysteresis which is caused by coulomb friction, temperature, and the stack up of the valves motivated by manufacturing tolerance. To cope with this problem, a lot of research work has been devoted to the development of various position-control systems for pneumatic actuators. Many of these systems use the proportional servo valve to drive the cylinders. Although accurate position control can be achieved with the proportional valves, they not only have a complex and bulky structure, but are also expensive compared to on-off solenoid valves. Therefore, some researchers have tried to use on-off solenoid valves to realize pneumatic actuators. Among presented control methods, the pulse width modulation (PWM) has drawn most attention due to its simple hardware construction.
In order to solve the problems of high-speed movement and precise position control of the X and Y cylinders for our robot, the applied pneumatic schemes of the cylinders are employed to drive the high-speed on-off solenoid valves, and an ordinary valve is used to adjust the air-flow and pressure to the cylinders.
The aim of the intelligent-control activities are methods and tools for intelligent real-time systems and mobile robotics with a specific focus on high-speed and low-cost systems. In this context 'intelligent' means explicit knowledge and / or learning techniques are used to specify the system behavior.
In the past, methods such as the Fuzzy-PID and the Variable controller were mostly applied to process control applications, but also in signal processing and systems modeling. Our work hence comprises methods which allow easy handling on the one hand and guarantees a safe and stable operation of adaptive, learning control systems even during closed-loop online learning on the other hand.

|
|
| Skycleaner IV1 | Skycleaner IV2 |
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).