
Sky cleaner I
This project which was supported by "Hi-Tech Research and Development Program of China (863 Plan)" was totally implemented at Robotics Institute in Beihang University (BUAA).
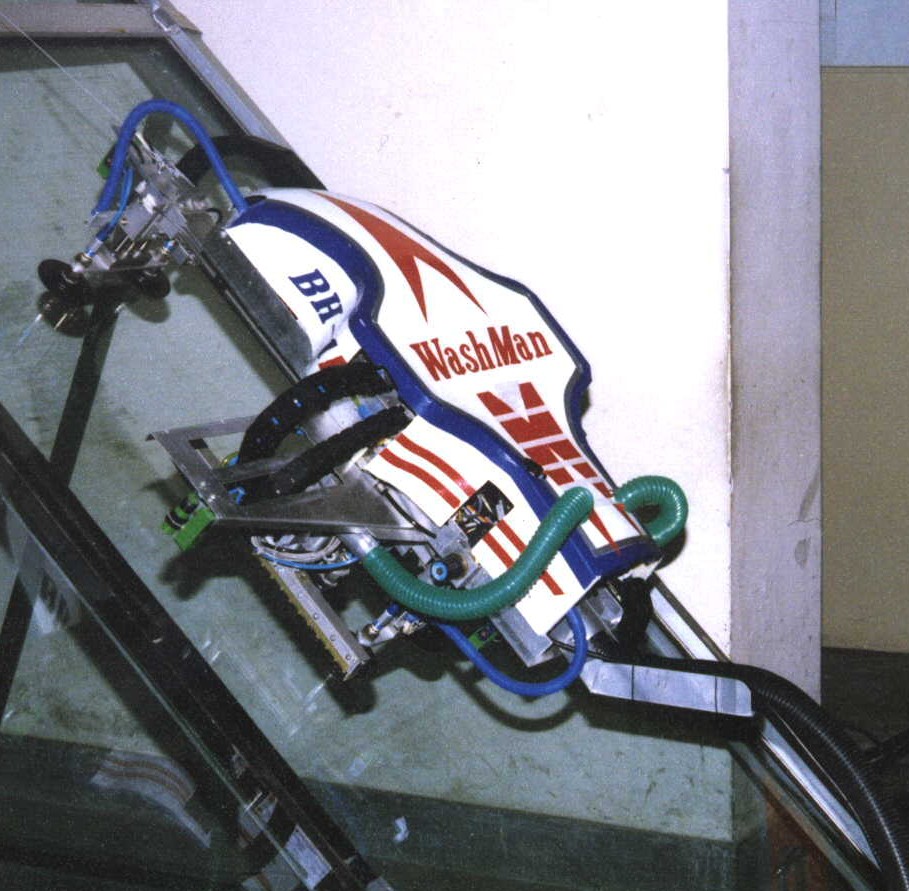
Our Chinese group at We designed Sky Cleaner 1 for cleaning the glass top of the Beijing West Railway Station before 2000. This robot was firstly named Washman. The system consists of a robot which is remotely operated and autonomously moves on glass walls to accomplish the cleaning action, and a support vehicle stationed on the ground providing electricity, air source and cleaning liquid for the robot. The supporting vehicle pumps the water to the brushes for cleaning; the drainage will then be collected and returned to a storage tank located in the front of the supporting vehicle. Approximately 90% of the water can be re-collected using this system.
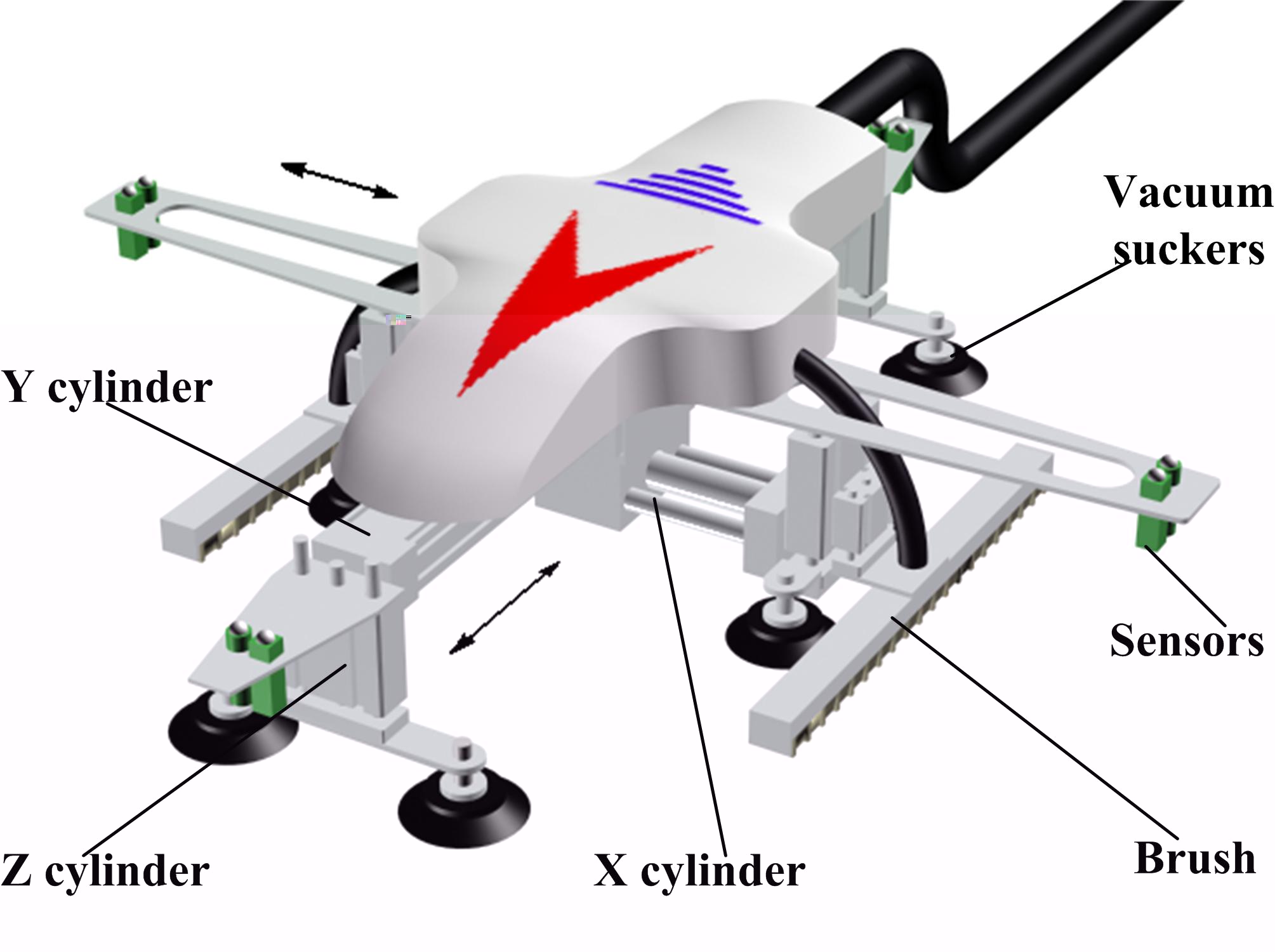
The lightweight robot can move on the surface of a slope up to 45 degrees in two perpendicular directions. The frame structure is adopted in the robot to satisfy the requirement of movement. The main body consists two cross-connected cylinders named X and Y. Connected at the ends of the X and Y cylinders are four short-stroke foot cylinders named Z , whose function is to lift or lower the vacuum suckers in the Z direction and support the body on the wall. Each group of vacuum suckers lay as the line distribution. The robot needs precise position control when it moves on the surface in order not to touch any obstacles. Outside the Z cylinders there are two brush cylinders connected to the ends of X cylinder. The passive cleaning head is designed to be capable of supplying the detergent and collecting the drainage. In this construction, this robot moves and cleans simultaneously to avoid a move-stop-clean sequence.
|
| Skycleaner I |
|
| Washman |
A PC is used as a console on the ground, and onboard controller includes a PC104 and a programmable logic controller (PLC). The PC104 is in charge of the global intelligent control such as planning, identifying the sensors inputs. The PLC is an assistant controller that collects the internal switch sensor signals and actuates all the solenoid valves.
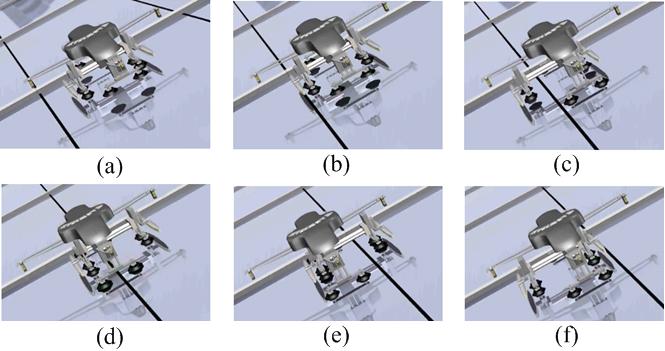
The following figure shows the process of crossing an obstacle when the robot moves from one glass to another in the right-left side. In this process the brush-sets are all in up-state and no touch with glasses.
(a) The robot is in home state, and the sensor detects the obstacle in the moving direction.
(b) The robot approaches the seals and begins the position control.
(c) The vacuum suckers connected to the Y cylinder are attached to the edge of one plank, the X cylinder moves from right to left.
(d) The vacuum suckers in the X direction are attached to the two glass planks, the Y cylinder is moving from right to left and the vacuum suckers connected to the Y cylinder straddle the seal.
(e) The vacuum suckers connected to the Y cylinder are attached to the two glass planks, the X cylinder is moving from right to left.
(f) The robot is now in home state again, and the process of crossing the obstacle is over.
Sky Cleaner 1 is the first prototype designed by our groups. The system has only limited dexterity and cannot work on a vertical wall. Because it has no waist joint, the robot is unable to correct the direction of motion. And the frequency for dealing with and crossing the obstacles is quite high so that the cleaning efficiency is only about 37.5 m2/ hour.
|
| Crossing seals |
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).