
Sky cleaner II
As the main member of the project "Service Robots for Glass-wall Cleaning of High-rise Buildings", I finished my master dissertation.
This project also supported by "Hi-Tech Research and Development Program of China (863 Plan)" was implemented at Robotics Institute in Beihang University (BUAA). This project was based on the collaboration with the Centre for Intelligent Design, Automation & Manufacturing in City University of Hong Kong.
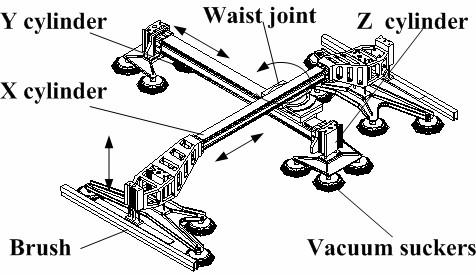
This project was aimed at developing a cost-effective, mobile and hassle-free robotic system for moving on vertical glass walls. Just to be on the safe side, a following unit is added to the system for protection. The function of this unit on the top of the building is simple and primary. There is a force sensor used to detect the tensile force of the following cable. In this way, the weight and payload of the robot are no longer limited by the wall surface and the suckers because the weight of the hoses from the supporting vehicle is completely supported by the following cable. Sky Cleaner 2 is designed to be compact and easy to transport from place to place. It is featured with sixteen suction pads which can carry a payload of approximately 45 kg including its body weight. Because of the special layout of the vacuum suckers, the robot can move in all directions freely without attention to the seals.
Two pneumatic cylinders provide both vertical and horizontal motion. Located at the centre of the robot, a specially designed waist joint gives a turning motion to the robot. A relatively small degree of rotation per step is turned in the present stage. Two pairs of simple brake cylinders are added to the position-controlled cylinders. A PWM method associates with a braking mechanism to achieve better position accuracy for placing the suction pads as close as possible to the window obstacles when a feedback signal has been detected by the ultrasonic sensors.
|
| Skycleaner II |
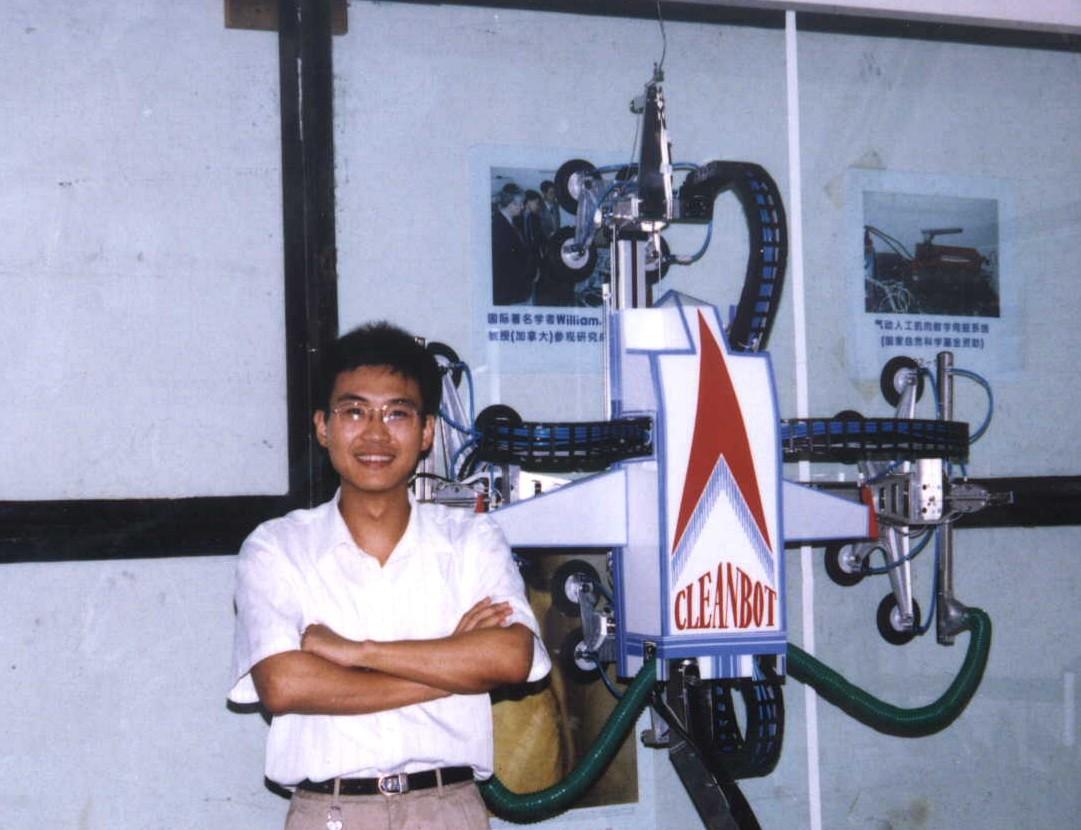
|
| Working in the lab |
Only an onboard PLC executes a sequence of solenoid valves on/off actions to perform commands that are sent by the operator through the PC console. Sky cleaner 2 is portable and cleaning efficiency is about 75 m2/ hour. But considerable stress is laid on weight reduction, the construction stiffness is somewhat low so that there is a small distortion while cleaning and climbing.
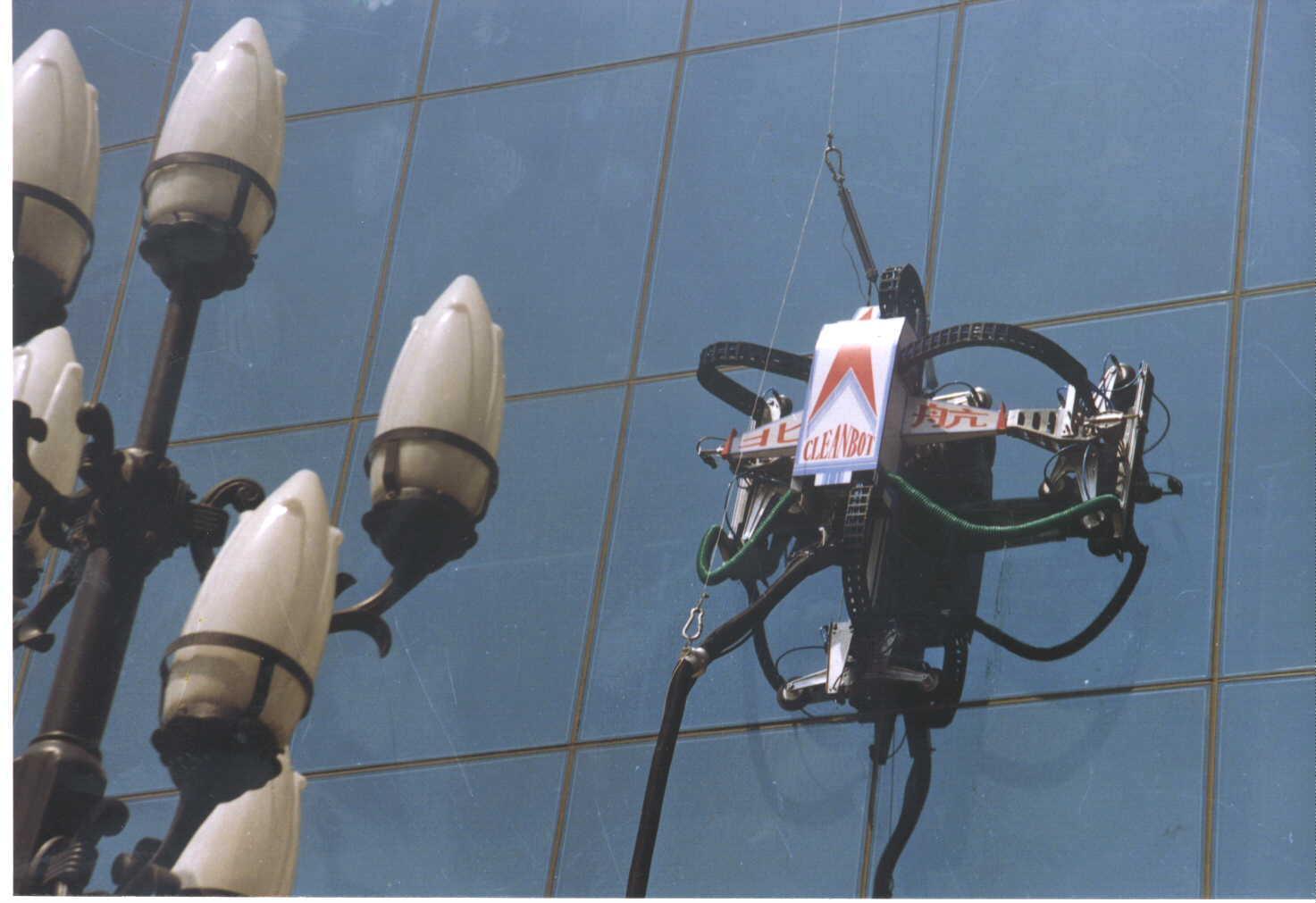
|
| Skycleaner II climbing |
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).