
Sky cleaner III
As Technical Coordinator of the project "Glass-wall Cleaning Robots for High-rise Buildings". The pneumatic robot named Skycleaner 3 has been developed and put to good use at the Shanghai Science and Technology Museum.
Key activities: System design; Pneumatic system design and manufacture; Research on pneumatic position control.
This project supported by "Beijing Science Committee project" was implemented at Robotics Institute in Beihang University (BUAA)
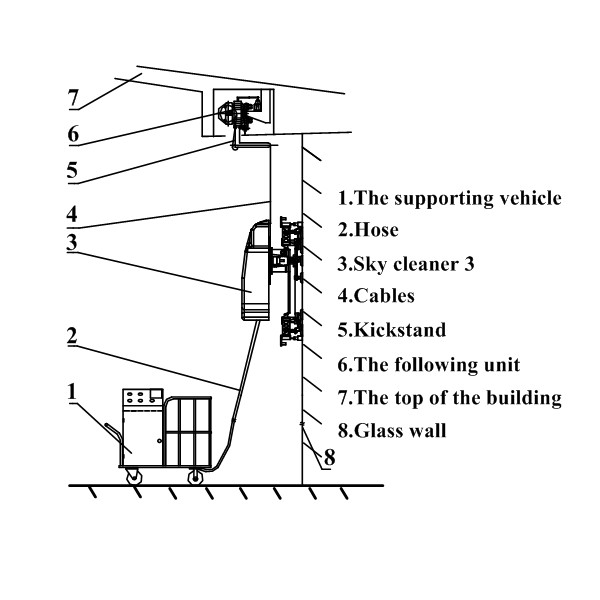
Sky cleaner 3 is a real product designed for cleaning the complicated curve of the Shanghai Science and Technology Museum in 2001. The building top is 40 m from the ground. From the left to the right its height gradually decreases. The total surface area of the outer wall is about 5000 m2. Due to the special arc shape, each glass is connected to its surrounding glasses at about a 2-degree angle.
The robotic system consists of three parts: 1) a following unit; 2) a supporting vehicle; 3) the cleaning robot. The robot is supported from above by cables from the following unit mounted on the top of the building. All following movements of the unit which protects against falling due to any type of failure are synchronized by the robot itself.
|
| Skycleaner III System |
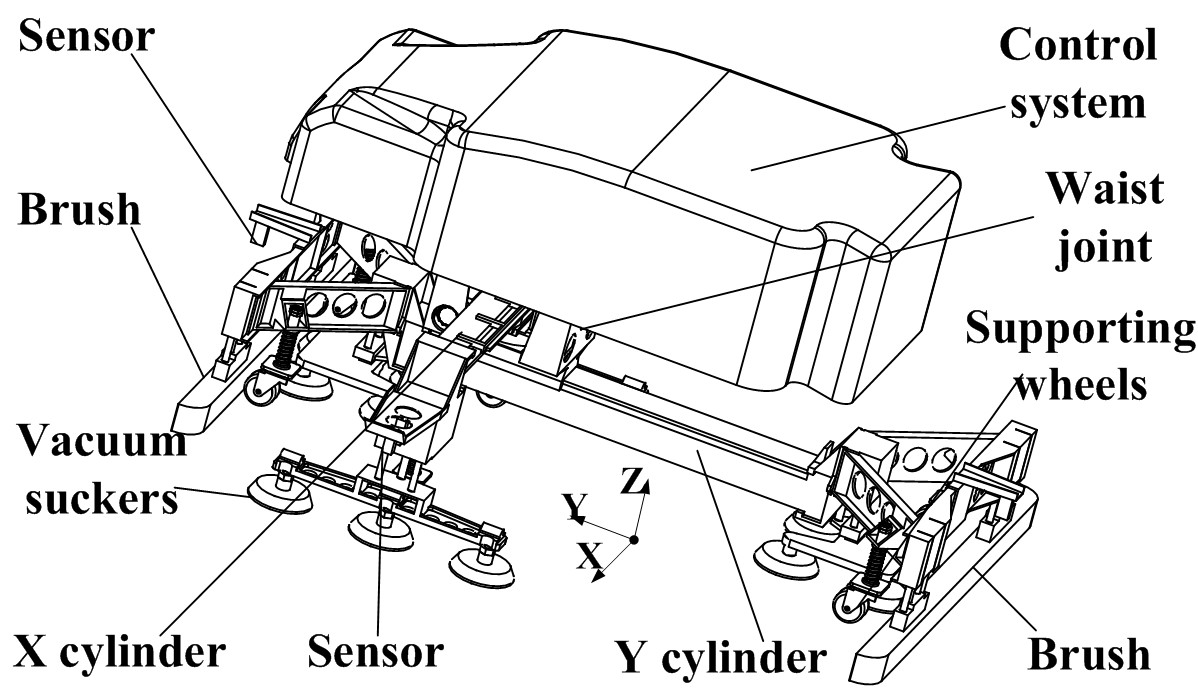
The sky cleaner 3 is shown in Fig. A turning waist joint actuated by a pendulum cylinder connects the X and Y cylinders. On opposite ends in the Y direction there are also four brush cylinders, which actuate the brushes up and down. An adaptive cleaning head is designed especially for effective, efficient and safe cleaning, equipped with a drainage collecting device. When the glass is being cleaned, the water is not allowed to drip down; it is firstly drawn off the glass wall through a vacuum pump on the robot. Then the water will flow down because of the gravity and be collected on the supporting vehicle on the ground. At last the drainage will be filtered, and then reused for cleaning. Some sensors that can detect the window obstacles are mounted on each end of the X and Y cylinders. The robot can both clean and walk on the glass walls automatically in the up-down direction as well as the right-left direction.
|
|
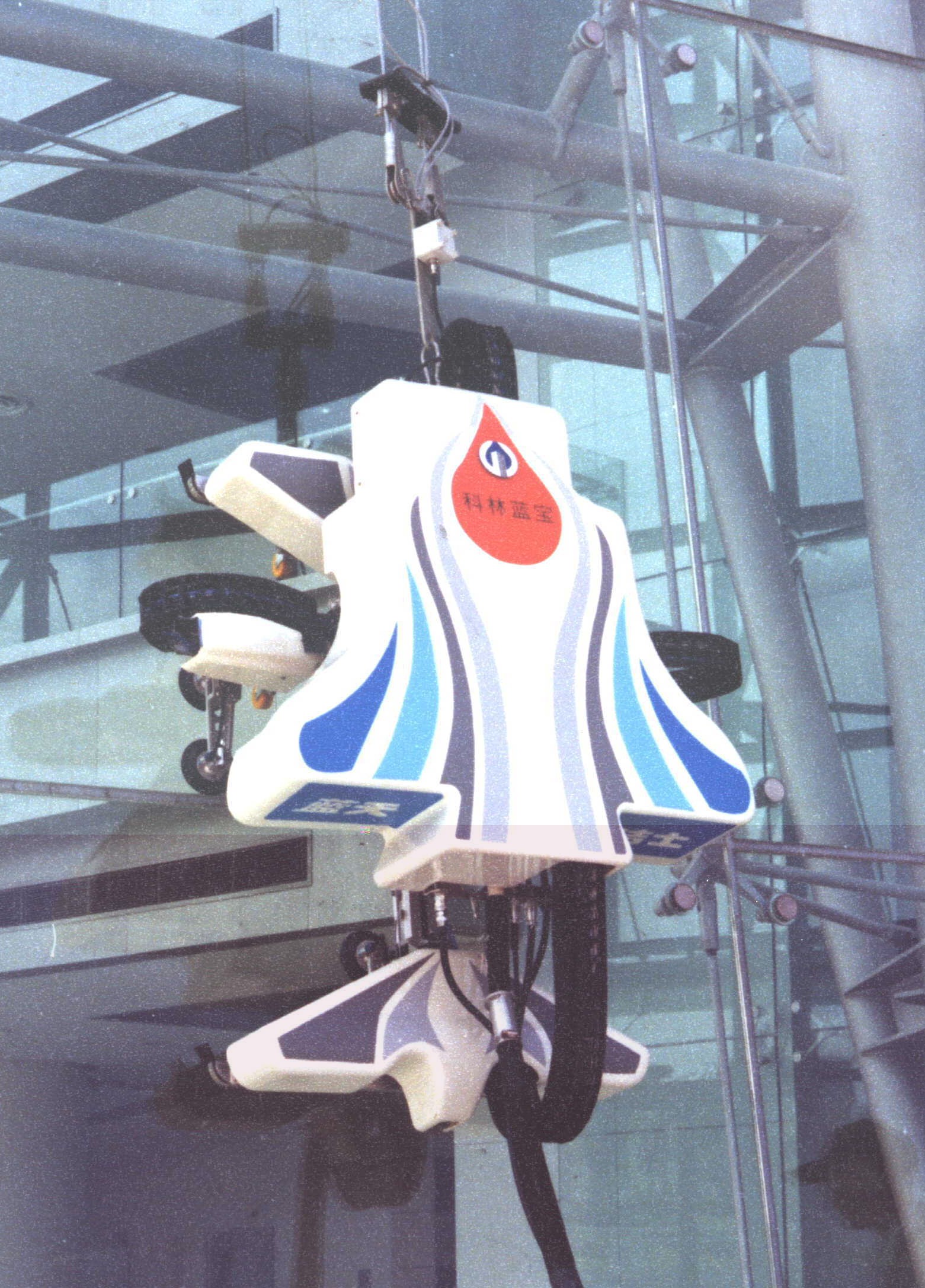
| Skycleaner III mechanical System | Skycleaner III |
Because the glass walls of the Shanghai Science and Technology Museum have no window frames, there are some supporting wheels near the vacuum suckers in the X and Y directions, which have been added to the mechanical construction to increase the stiffness. In order to move from one column of glass to another in the right-left direction, a specially designed ankle joint gives a passive turning motion to the suckers. This joint is located between the connecting piece which joins the vacuum suckers with the Y cylinder and the plank beneath it to which 4 vacuum-suckers are attached.
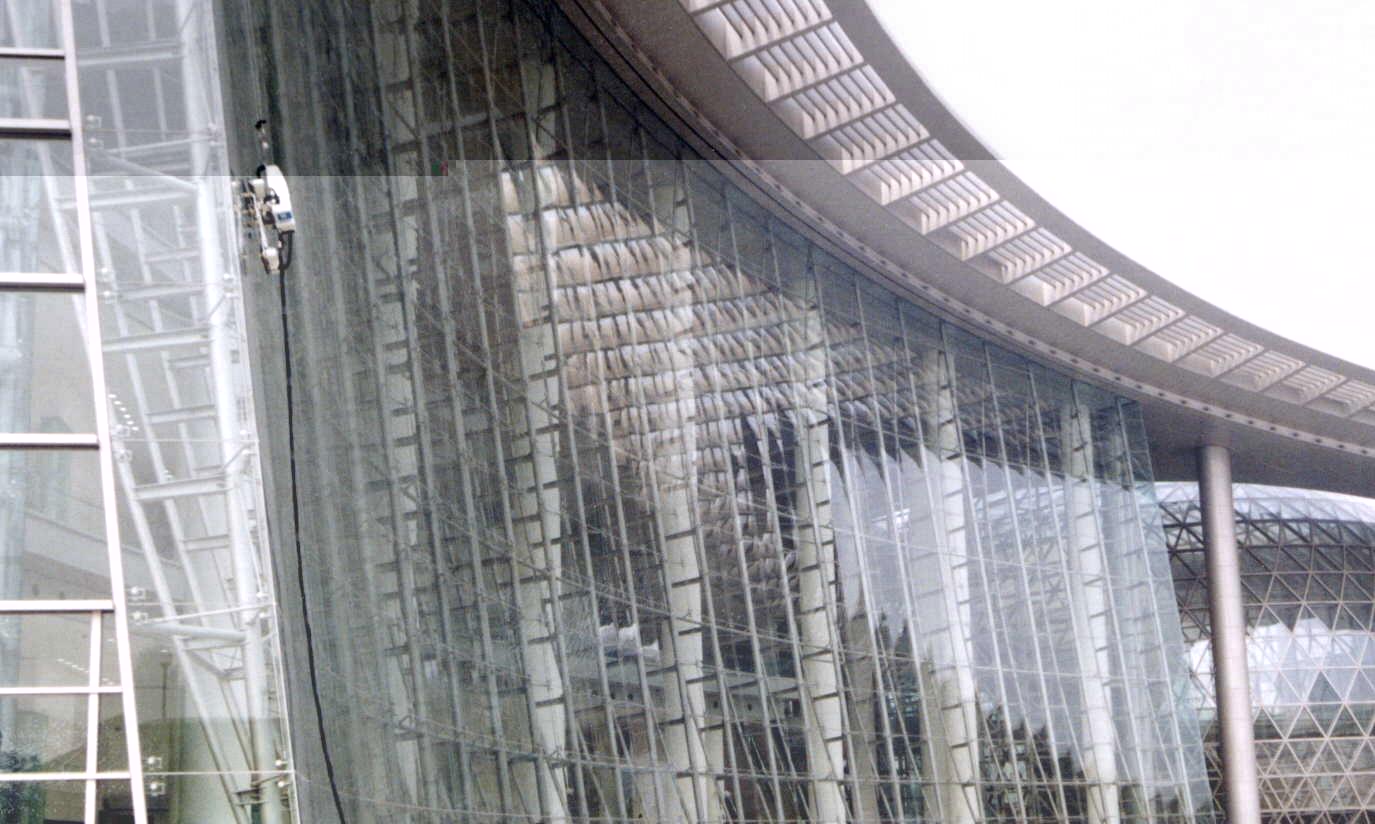
A PLC is used for the robot control system, which can directly count the pulse signals from the encoder and directly drive the solenoid valves, relays and vacuum ejectors. FX2N-4AD which is added to the system can identify the sensor analog signals. The control and monitoring of the robot is achieved through the GUI to allow an effective and user friendly operation of the robot. The communication interface between the PLC and the controller of the following unit is designed to synchronizing the following movement of the cables. The sensors on the robot can be divided into external and internal sensors. The external sensors are responsible for collecting information about the operational environment. The internal sensors are to reflect the self-status of the robot. There are two kinds of external sensors on the robot: touchable sensors and ultrasonic analog sensors. For each active joint, there are limit switches to give the controller the position of the joint. On the joint where the accurate position is needed, the optical encoder is used. The vacuum sensors are used to monitor the vacuum condition of the suckers and provide information to determine whether the suction on the glass surface is stable. Fig. 7 shows the robot is working on the glass walls of this museum.
|
| Skycleaner III working on the target |
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).