
Sky Cleaners
Here I am very proud of introducing my research on pneumatic climbing robots.
Climbing robots are kind of special mobile robots which can move and work vertically on the working targets to implement typical given tasks. They feature the special working environment and mobility against gravity.
2. Welding and manipulation in construction industry, especially of metallic structures such as in bridges, shipping, off-shore industries and buildings' skeletons usually involve a very high number of dangerous manual operations ;
3. Cleaning and maintenance for high-rise buildings.
Now there are a large number of high-rise buildings with curtain glass walls in modern cities. Figure 1 shows the typical environments for cleaning robots. These external cladding walls require constant cleaning which is presently typically carried out using a costly, permanent gondola system hanging from the roof of the building. This solution is highly expensive, quite dangerous in mid-air.
Since 1996, our groups have been developing a family of autonomous climbing robots with sliding frames for glass-wall cleaning. The eventual goal is to design a dexterity, intelligent cleaning robotic system which can be used on different buildings and meet the requirements of real application.
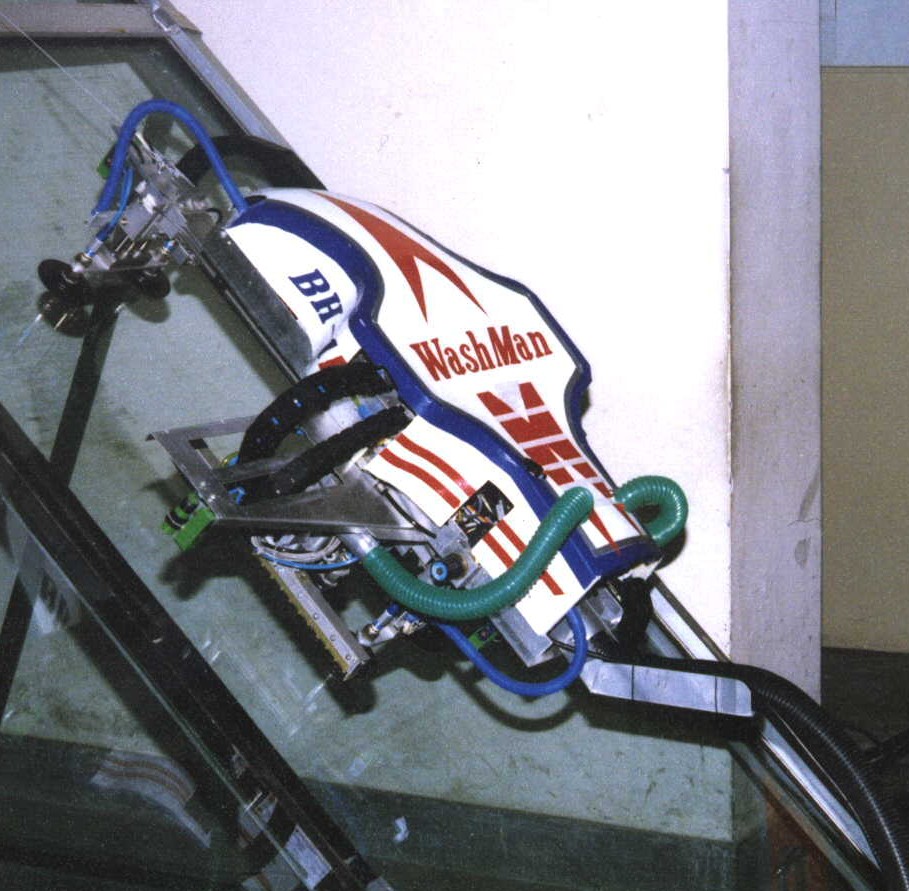
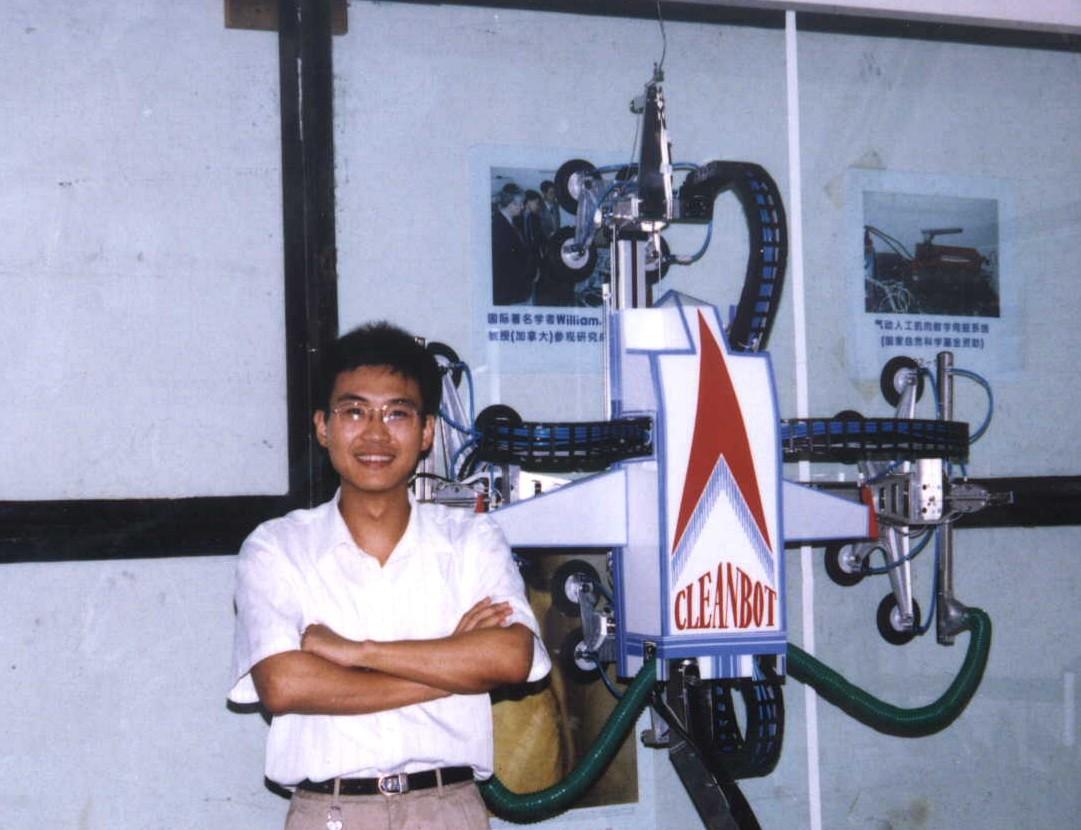
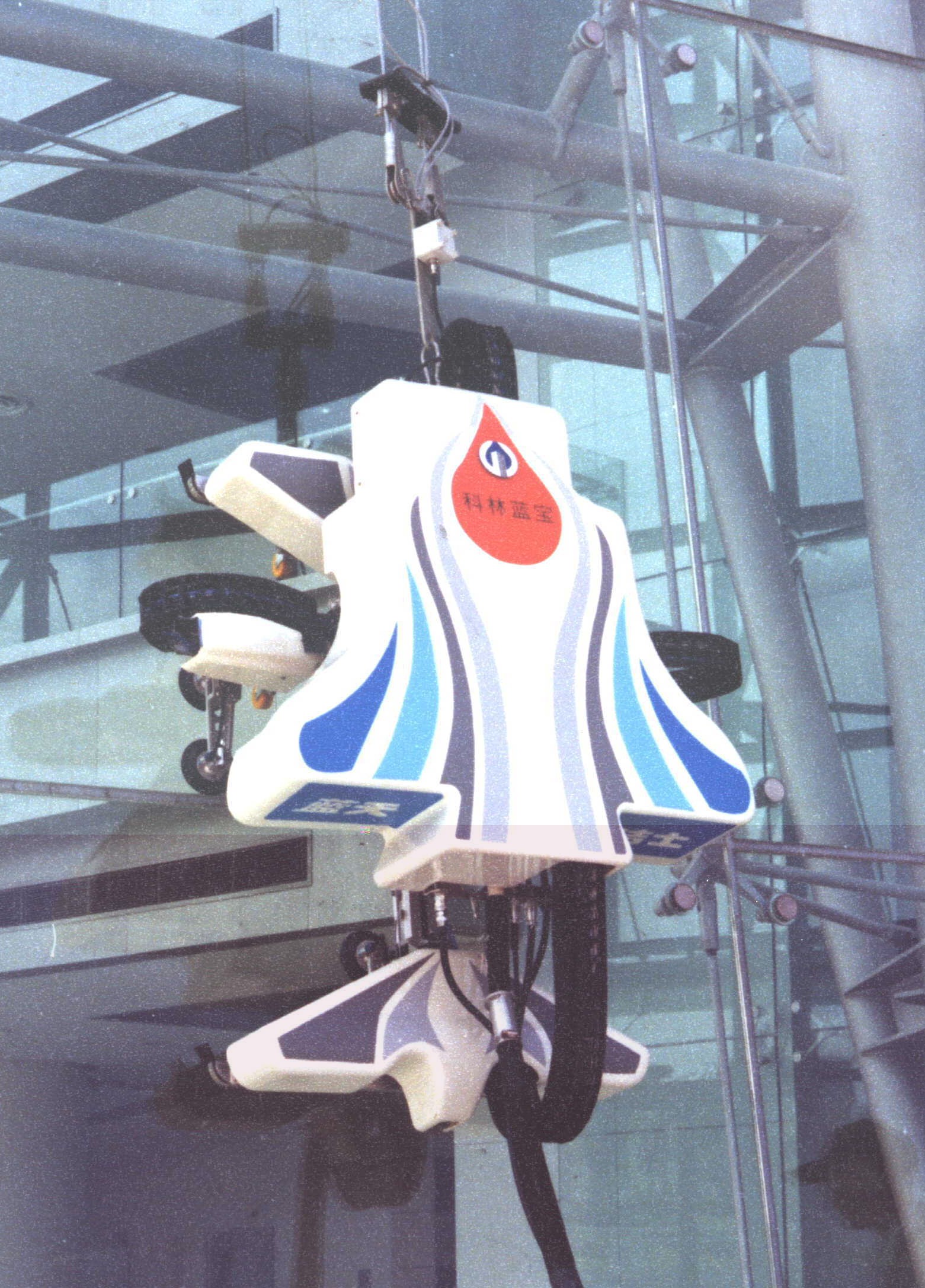
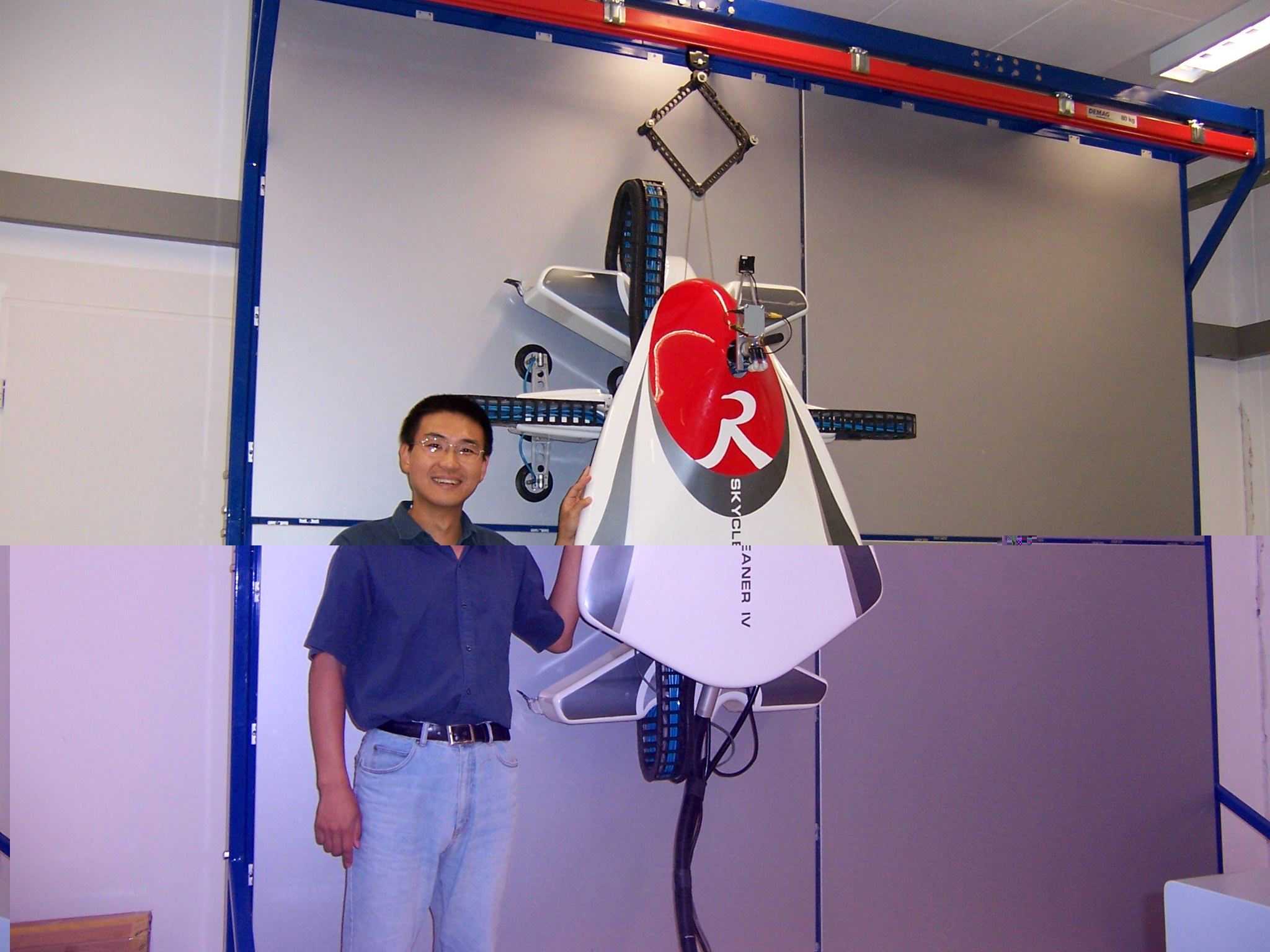
There are three driving methods for walking robotic system. The fluid drive is not suitable for climbing robots because of the problems such as non-cleanliness and leakiness. The family of our autonomous climbing robots for glass wall cleaning are totally actuated by pneumatic cylinders and sucked to the glass wall with vacuum grippers. The first two prototypes are mainly used for research and the last one is a real product designing for cleaning the glass surface of Shanghai Science and Technology Museum.
With the pneumatic actuators the climbing robot can be made lightweight which is one of the most important specifications for devices working on high-rise buildings. Secondly the motion driven by pneumatic actuators has a passive compliance which makes the robot safer than driven by motors under the situation of interacting with the brittle glass.
I have been working on this research 10 years until now. These projects were supported by "Hi-Tech Research and Development Program of China (863 Plan)" and "Beijing Science Committee project". Sky Cleaner 2 was also based on the collaboration with City University of Hong Kong.
In ten years, I should thank for my supervisor, Prof. ZONG Guanghua from Robotics Institute in Beihang University (BUAA). I also should thank for Prof. SUN Xingchu, Prof. BI Shusheng and Dr. LIU Rong for a lot of helping and assisting in the projects.
|
|
|
|
| Skycleaner I | Skycleaner II | Skycleaner III | Skycleaner IV |
DEMONSTRATION
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).