#include <bhkinematic.h>
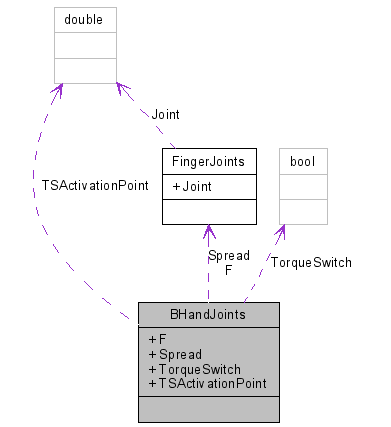
Collaboration diagram for BHandJoints:
Data Fields | |
| FingerJoints | F [NUM_FINGERS] |
| FingerJoints | Spread |
| bool | TorqueSwitch [NUM_FINGERS] |
| double | TSActivationPoint [NUM_FINGERS] |
It contains the joint values of each finger and a flag for TorqueSwicth activation.
| FingerJoints BHandJoints::F[NUM_FINGERS] |
Array for joint values of each finger
Joint values of Spread joints (0 - neg, 1 - pos)
| bool BHandJoints::TorqueSwitch[NUM_FINGERS] |
TorqueSwitch State of each finger
| double BHandJoints::TSActivationPoint[NUM_FINGERS] |
Point of TorqueSwicth activation in DEG
|
|
Generated Wed Aug 16 14:59:23 2006 by
|