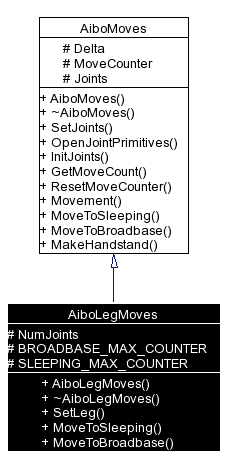
#include <aibolegmoves.h>
Inheritance diagram for AiboLegMoves:

Public Member Functions | |
| AiboLegMoves (AiboLeg *leg) | |
| virtual | ~AiboLegMoves () |
| void | SetLeg (AiboLeg *leg) |
| MOVE_STATUS | MoveToSleeping (OSubject *subject) |
| MOVE_STATUS | MoveToBroadbase (OSubject *subject) |
| void | SetJoints (AiboJoint *joints) |
| void | OpenJointPrimitives () |
| void | InitJoints (OSubject *subject) |
| int | GetMoveCount () |
| void | ResetMoveCounter () |
| MOVE_STATUS | Movement (OSubject *subject, const double *angles, int numMoves) |
| void | MakeHandstand (OSubject *subject) |
Protected Attributes | |
| int | NumJoints |
| double * | Delta |
| int | MoveCounter |
| AiboJoint * | Joints |
Static Protected Attributes | |
| static const int | BROADBASE_MAX_COUNTER = 48 |
| static const int | SLEEPING_MAX_COUNTER = 48 |
|
|
Default constructor.
Here is the call graph for this function:  |
|
|
Default destructor |
|
|
Method to set AiboLeg
Here is the call graph for this function:  |
|
|
Moves legs of AIBO to sleeping position
Implements AiboMoves. Here is the call graph for this function: 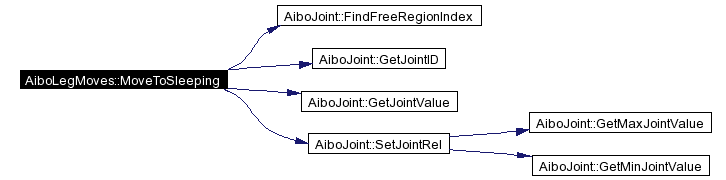 |
|
|
Moves legs of AIBO to boradbase position
Implements AiboMoves. Here is the call graph for this function: 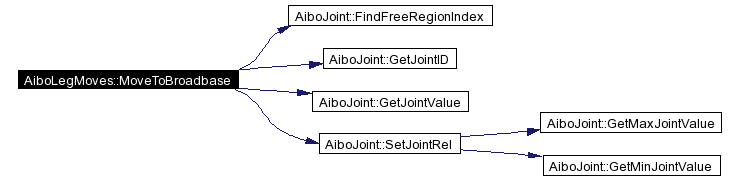 |
|
|
Method to set head
|
|
|
Method to open joint primitives. I.e. executes AiboJoint->OpenPrimitives() Here is the call graph for this function:  |
|
|
Method which initialises the joint values. I.e. executes AIboJoint->RefreshCommandVectors()
Here is the call graph for this function:  |
|
|
Method to get the move count of thhe actual movement
|
|
|
Resets the MoveCounter |
|
||||||||||||||||
|
Method executes a move to the given Angels in NumMove frames
Here is the call graph for this function:  |
|
|
Moves AIBO into handstand. WARNING: Method not ready yet.
|
|
|
Number of steps which should be used to reach Bradbase position |
|
|
Number of steps which should be used to reach Sleeping position |
|
|
Numer of leg joints of AIBOI |
|
|
Variable to store the delta angleas for movements |
|
|
Counter for counting move steps |
|
|
Head var for joint access |
|
|
Generated Thu Jan 19 11:55:55 2006 by
|