
#include <aibojoint.h>
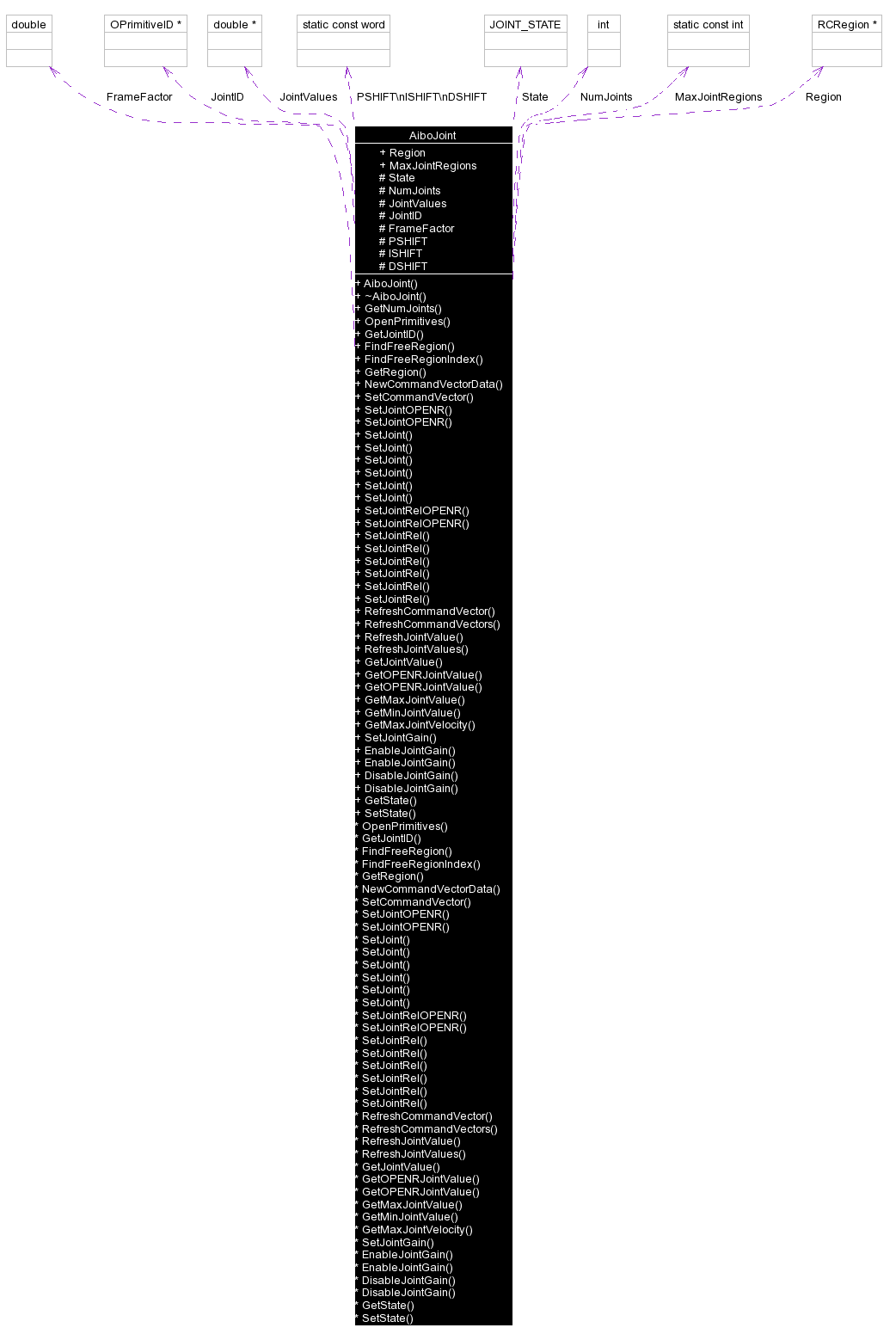
Inheritance diagram for AiboJoint:
Public Member Functions | |
| AiboJoint () | |
| virtual | ~AiboJoint () |
| int | GetNumJoints () const |
Methods for joint primitives | |
| virtual void | OpenPrimitives ()=0 |
| OPrimitiveID | GetJointID (int j) const |
Methods for commannd vector manipulation and generation | |
| RCRegion * | FindFreeRegion () const |
| int | FindFreeRegionIndex () const |
| RCRegion * | GetRegion (int index=0) |
| virtual void | NewCommandVectorData ()=0 |
| void | SetCommandVector (int index, OCommandVectorData *vec) |
Methods for setting joint angles | |
| void | SetJointOPENR (slongword angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJointOPENR (double angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJoint (double start, double angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJoint (double start, double angle, OPrimitiveID joint, int jointIndex, int numFrames, int cmdVecIndex) |
| void | SetJoint (double angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJoint (double angle, OPrimitiveID joint, int jointIndex, int numFrames, int cmdVecIndex) |
| void | SetJoint (slongword angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJoint (slongword angle, OPrimitiveID joint, int jointIndex, int numFrames, int cmdVecIndex) |
| void | SetJointRelOPENR (slongword angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJointRelOPENR (double angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJointRel (double start, double angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJointRel (double start, double angle, OPrimitiveID joint, int jointIndex, int numFrames, int cmdVecIndex) |
| void | SetJointRel (double angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJointRel (double angle, OPrimitiveID joint, int jointIndex, int numFrames, int cmdVecIndex) |
| void | SetJointRel (slongword angle, OPrimitiveID joint, int jointIndex, int cmdVecIndex) |
| void | SetJointRel (slongword angle, OPrimitiveID joint, int jointIndex, int numFrames, int cmdVecIndex) |
| void | RefreshCommandVector (int cmdVecIndex) |
| void | RefreshCommandVectors () |
| void | RefreshJointValue (int index) |
| void | RefreshJointValues () |
Methods for getting joint angles | |
| double | GetJointValue (int index) const |
| double | GetOPENRJointValue (OPrimitiveID joint) const |
| double | GetOPENRJointValue (int joint) const |
| virtual double | GetMaxJointValue (int index, JOINT_UNIT unit=ANGLE_RAD) const =0 |
| virtual double | GetMinJointValue (int index, JOINT_UNIT unit=ANGLE_RAD) const =0 |
| virtual double | GetMaxJointVelocity (int index, JOINT_UNIT unit=ANGLE_RAD) const =0 |
Methods for stetting joint gain | |
| virtual void | SetJointGain ()=0 |
| void | EnableJointGain () |
| void | EnableJointGain (OPrimitiveID id) |
| void | DisableJointGain () |
| void | DisableJointGain (OPrimitiveID id) |
Methods for state of joints | |
| JOINT_STATE | GetState () const |
| void | SetState (JOINT_STATE st) |
Data Fields | |
| RCRegion * | Region [MaxJointRegions] |
Static Public Attributes | |
| static const int | MaxJointRegions = 2 |
Protected Attributes | |
| JOINT_STATE | State |
| int | NumJoints |
| double * | JointValues |
| OPrimitiveID * | JointID |
| double | FrameFactor [ocommandMAX_FRAMES] |
Static Protected Attributes | |
| static const word | PSHIFT = 0x000e |
| static const word | ISHIFT = 0x0002 |
| static const word | DSHIFT = 0x000f |
This class gives you access to the AIBO Joints.
|
|
Default constructor |
|
|
Default destructor |
|
|
Initializes the JointID's |
|
|
|
|
|
Finds a free memory region (RCRegion) in which the next command data can be set
|
|
|
Finds a free memory region (RCRegion) in which the next command data can be set
|
|
|
returns the command vector corresponding to the index |
|
|
Creates a new RCRegion with a new CommandVectorData |
|
||||||||||||
|
Method allows user to insert an own command vector in memory region
|
|
||||||||||||||||||||
|
Sets the joint value in the given command vector to a given value
|
|
||||||||||||||||||||
|
Sets the joint value in the given command vector to a given value and know your angles by yourself!
Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Sets the joint value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||||||||||
|
Sets the joint value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Sets the joint value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Sets the joint value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Sets the joint value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Sets the joint value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Sets the joint value relative to the actual value in the given command vector to a given value
|
|
||||||||||||||||||||
|
Sets the joint value relative to the actual value in the given command vector to a given value and know the angles by yourself!
Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Sets the joint value relative to the actual value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||||||||||
|
Sets the joint value relative to the actual value in the given command vector to a given value.
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Sets the joint value relative to the actual value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Sets the joint value relative to the actual value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Sets the joint value relative to the actual value in the given command vector to a given value
Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Sets the joint value relative to the actual value in the given command vector to a given value
Here is the call graph for this function:  |
|
|
Sets all values of each joint in a command vector to the actual joint values
Here is the call graph for this function:  |
|
|
Sets all values of each joint in all command vectors to the actual joint values Here is the call graph for this function:  |
|
|
Refreshes the protocoled joint value
|
|
|
Refreshes all of the protocoled joint values
Here is the call graph for this function:  |
|
|
Returns the protocoled joint value (where you think you are)
|
|
|
Returns the real joint value
|
|
|
Returns the real joint value
|
|
||||||||||||
|
Returns the max joint value for joint with the given index
|
|
||||||||||||
|
Returns the mix joint value for joint with the given index
|
|
||||||||||||
|
Returns the max joint velocity for joint with the given index
|
|
|
Sets the joint gain for all joints and enables it |
|
|
Enables the joint gain for all joints(already included in SetJoint Gain() ) |
|
|
Enables the joint gain (already included in SetJoint Gain() )
|
|
|
Disables the joint gain for all joints |
|
|
Disables the joint gain
|
|
|
Returns the state of the joints
|
|
|
Sets the Joint State to a given state
|
|
|
Returns the numer of joint of an ERS-220
|
|
|
Number of maximum allowed RCRegions for joint control |
|
|
Array of RCRegion s for joint control |
|
|
State of joints |
|
|
Number of Joints |
|
|
Array for joint angle protocol (where you think you are) |
|
|
Array for storing primitive ID's |
|
|
P-Shift value (PID-Controller) for AIBO joints |
|
|
I-Shift value (PID-Controller) for AIBO joints |
|
|
D-Shift value (PID-Controller) for AIBO joints |
|
|
Array for FrameFactor. Normally a motion is performed over 16 frames. This factor multiplied with die difference of current and desired value so that the gain from one frame to an other is constant. It is used in nearly every SetJoint...(...) metho. |
|
|
Generated Thu Jan 19 11:55:35 2006 by
|