
Bachelor Thesis
by Denis Klimentjew and Andre Stroh
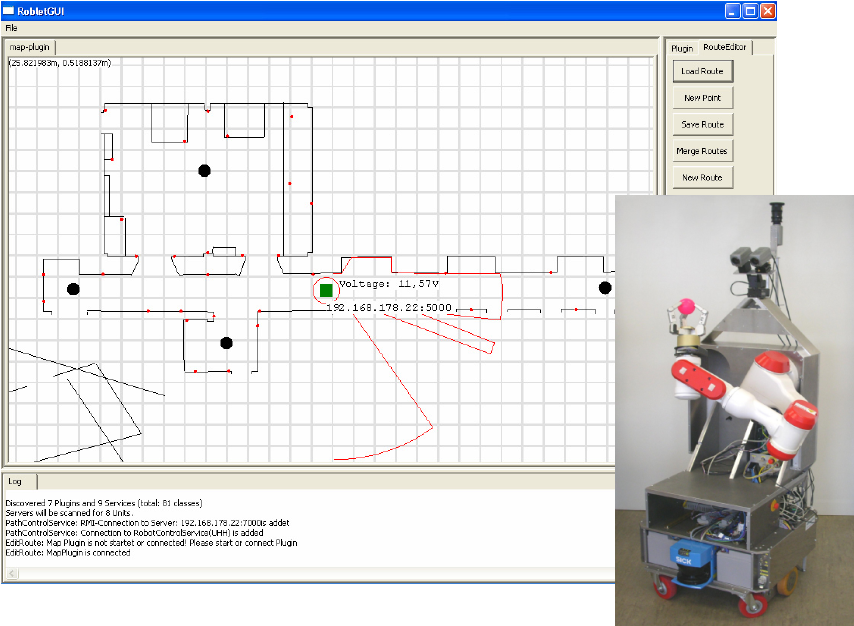
The present bachelor thesis deals with the realisation of a universal control graphical user interface for mobile service robots. The key issues of this work is the control of the robots and the overview of the most important measuring instruments as well as the transmission and removing new routes. Besides, the communication between the user and robots takes place about the graphic surface. The whole project draught is based on the distributed architecture which builds up at Java and Java Virtual Machine. The platform independence is thereby guaranteed and the resource distribution is improved. The graphic control surface is realised as a framework. This framework is the permanent fixture component of the control surface. All functions of the control and graphic representation are integrated as a plugins or services. So that the better adaptability and the lighter expandability is guaranteed.
Hamburg, Germany, May 2006
Downloads
 Bachelor_thesis.pdf (5.0 MB)
Bachelor_thesis.pdf (5.0 MB)