
Diploma Thesis
 "3 Dimensional Reconstruction from Monocular Image Sequences"
"3 Dimensional Reconstruction from Monocular Image Sequences"by Sascha Jockel
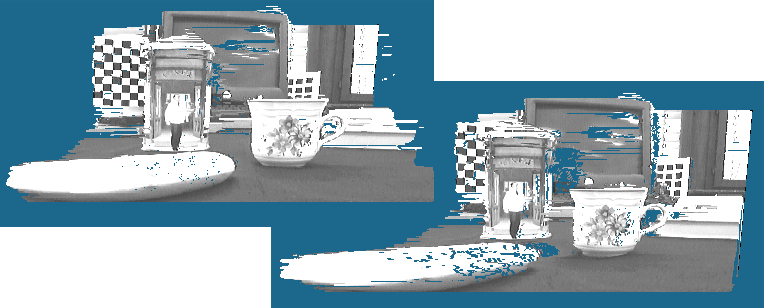
Image driven environment perception is one of the main research topics in the field of autonomous robot applications. This thesis will present an image based three dimensional reconstruction system for such robot applications in case of daily table scenarios. Perception will be done at two spatial-temporal varying positions by a micro-head camera mounted on a six-degree-of-freedom robot-arm of our service-robot TASER. Via user interaction the epipolar geometry and fundamentalmatrix will be calculated by selecting 10 corresponding corners in both input images predicted by a Harris-corner-detector. The images then will be rectified by the calculated fundamentalmatrix to bring corresponding scanlines together on the same vertical image coordinates. Afterwards a stereocorrespondence is made by a fast Birchfield algorithm that provides a 2.5 dimensional depth map of the scene. Based on the depth map a three dimensional textured point-cloud is presented as interactive OpenGL scene model.
Hamburg, Germany, June 2006
Downloads
 diploma_thesis.pdf (7.2 MB)
diploma_thesis.pdf (7.2 MB)