#include <picontroller.h>
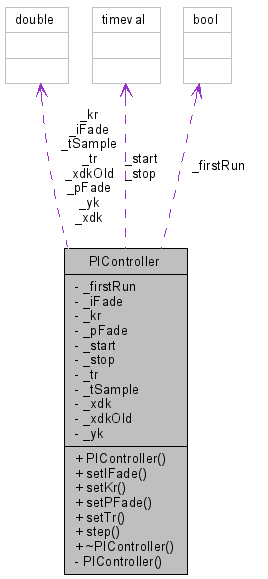
Collaboration diagram for PIController:
Public Member Functions | |
| PIController (const double kr, const double tr) | |
| void | setIFade (const double iFade) |
| void | setKr (const double kr) |
| void | setPFade (const double pFade) |
| void | setTr (const double tr) |
| double | step (const double xDesired, const double xNow) |
| PIController::PIController | ( | const double | kr, | |
| const double | tr | |||
| ) |
constructor with parameters kr = PI controller proportional gain tr = PI controller time constant
| void PIController::setIFade | ( | const double | iFade | ) |
sets the fading variable iFade
| void PIController::setKr | ( | const double | kr | ) |
sets the gain kr for the PI controller
| void PIController::setPFade | ( | const double | pFade | ) |
fading for the P part of the controller
| void PIController::setTr | ( | const double | tr | ) |
sets the controller's time constant _tr
| double PIController::step | ( | const double | xDesired, | |
| const double | xNow | |||
| ) |
starts one cycle of the PI controller and returns the correcting variable
|
|
Generated Wed Aug 16 15:01:30 2006 by
|