#include <bhandforce.h>
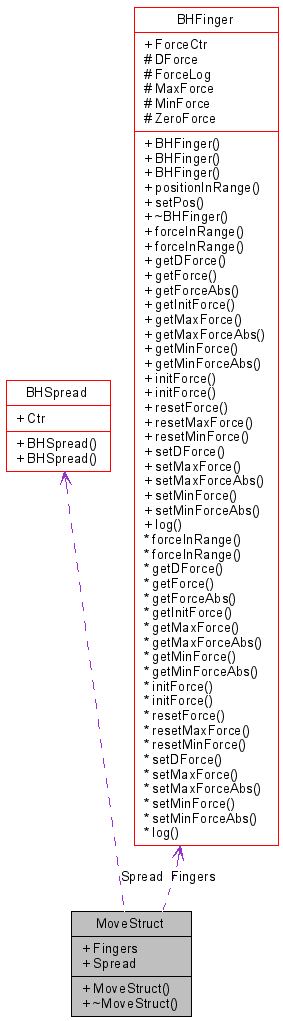
Collaboration diagram for MoveStruct:
Public Member Functions | |
| MoveStruct (MotorFeedback *f1, MotorFeedback *f2, MotorFeedback *f3, MotorFeedback *spread) | |
| Contructor for MoveStruct. | |
| ~MoveStruct () | |
| Destructor. | |
Data Fields | |
| BHFinger * | Fingers [3] |
| BHSpread * | Spread |
Helper class for storing information of movement parameters in one object.
| MoveStruct::MoveStruct | ( | MotorFeedback * | f1, | |
| MotorFeedback * | f2, | |||
| MotorFeedback * | f3, | |||
| MotorFeedback * | spread | |||
| ) | [inline] |
Contructor for MoveStruct.
| f1 | Pointer to feedback values for Finger F1 | |
| f2 | Pointer to feedback values for Finger F2 | |
| f3 | Pointer to feedback values for Finger F3 | |
| spread | Pointer to feedback values for Spread |
| MoveStruct::~MoveStruct | ( | ) | [inline] |
Destructor.
Deletes the containers.
The constraints for the three fingers.
The constraints for the spread motor
|
|
Generated Wed Aug 16 15:01:29 2006 by
|