#include <glbhand.h>
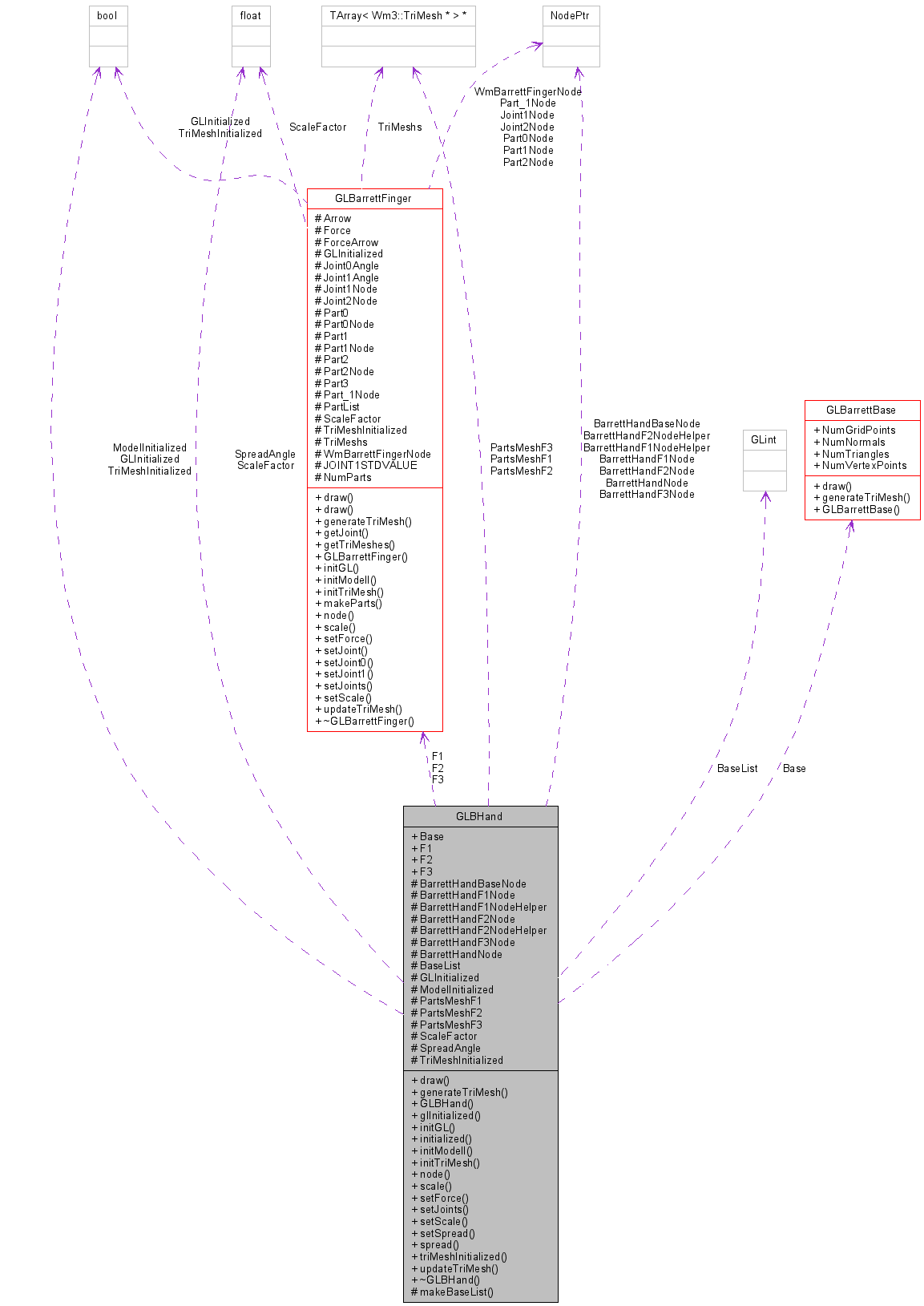
Collaboration diagram for GLBHand:
Public Member Functions | |
| void | draw (GLenum mode=GL_RENDER) |
| Draws the OpenGL modell. | |
| GLBHand () | |
| Constructor. | |
| void | initGL () |
| Initializes the OpenGL part of the hand modell. | |
| void | initModell () |
| Initializes the modell for usage. | |
| void | initTriMesh () |
| Initializes the Mesh (which is needed for the collision part). | |
| void | setForce (const int &finger, const double &force) |
| Sets force that should be displayed at finger. | |
| void | setJoints (double *jointValues) |
| Sets the joint values for all values of the BarrettHand. | |
| void | setSpread (const float &spread) |
| Sets joint Angle for Spread joint. | |
| ~GLBHand () | |
| Destructor. | |
Data Fields | |
| GLBarrettBase | Base |
| Obejct which draws Barrett Base. | |
| GLBarrettFinger | F1 |
| Obejct which draws finger F1. | |
| GLBarrettFinger | F2 |
| Obejct which draws finger F2. | |
| GLBarrettFinger | F3 |
| Obejct which draws finger F3. | |
Protected Member Functions | |
| void | makeBaseList () |
| Generates display list for base. | |
Protected Attributes | |
| GLint | BaseList |
| float | SpreadAngle |
| Angle for Spread Joint. | |
This class main aim is to provide an simple interface for drawing a BarrettHand as OpenGL modell.
| GLBHand::GLBHand | ( | ) |
Constructor.
You still have to call initModell() to use the draw method.
| GLBHand::~GLBHand | ( | ) |
Destructor.
I.e deletes OpenGL display lists created with initModell() .
| void GLBHand::draw | ( | GLenum | mode = GL_RENDER |
) |
Draws the OpenGL modell.
This method sould be used by OpenGL::display() or paintGL() to draw a modell of a BarrettHand.
| void GLBHand::initGL | ( | ) |
Initializes the OpenGL part of the hand modell.
I.e gerates the display lists
| void GLBHand::initModell | ( | ) |
Initializes the modell for usage.
I.e. creates the OpenGL display lists
| void GLBHand::initTriMesh | ( | ) |
Initializes the Mesh (which is needed for the collision part).
| void GLBHand::makeBaseList | ( | ) | [protected] |
Generates display list for base.
| void GLBHand::setForce | ( | const int & | finger, | |
| const double & | force | |||
| ) | [inline] |
Sets force that should be displayed at finger.
With the Arrow indicationg the force on the fingertip is scaled by the value.
| finger | Index of finger to which the force is applied (1 to 3) | |
| force | Force value, applied on fingertip |
Here is the call graph for this function:

| void GLBHand::setJoints | ( | double * | jointValues | ) | [inline] |
Sets the joint values for all values of the BarrettHand.
All joint values are set the one in the jointValues oder is:
F1J1 ,F1J2, F2J1, F2J2, F3J1, F3J2, Spread, -Spread.
| jointValues | Joint Values of Hand. Unit DEG |
Here is the call graph for this function:

| void GLBHand::setSpread | ( | const float & | spread | ) |
Sets joint Angle for Spread joint.
The is the value by which F1 and -F2 are rotated. Unit : DEG
Obejct which draws Barrett Base.
This object is protected because you normally do not want to modify it.
GLint GLBHand::BaseList [protected] |
Display list for BarrettHand base.
Obejct which draws finger F1.
This object is public because it makes it easier to set the joint angles.
Obejct which draws finger F2.
This object is public because it makes it easier to set the joint angles.
Obejct which draws finger F3.
This object is public because it makes it easier to set the joint angles.
float GLBHand::SpreadAngle [protected] |
Angle for Spread Joint.
Unit : DEG
|
|
Generated Wed Aug 16 15:01:23 2006 by
|