#include <bhandforcekin.h>
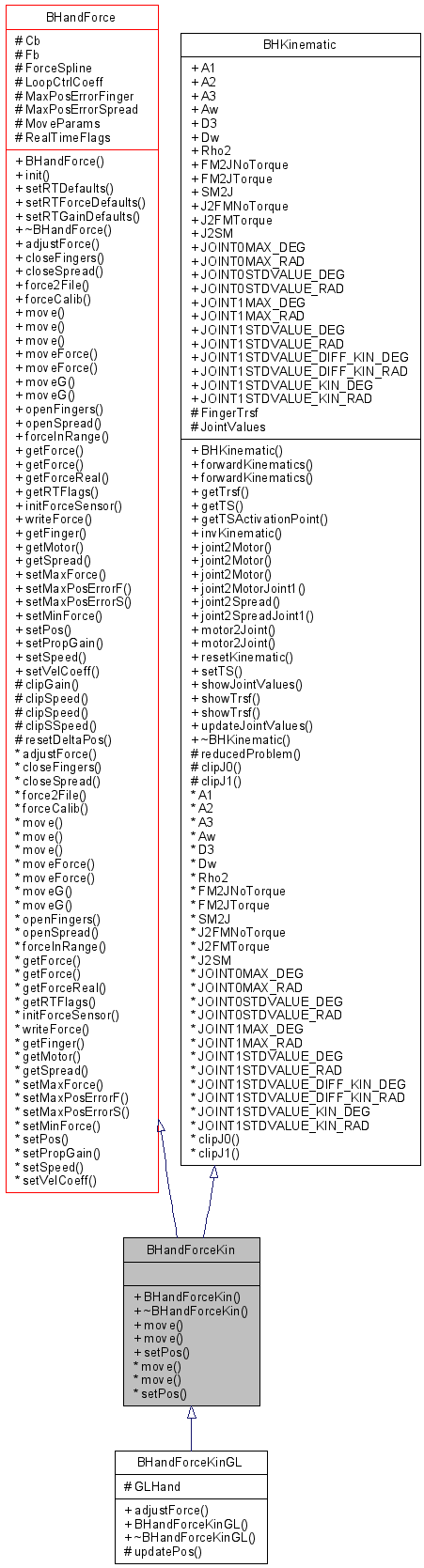
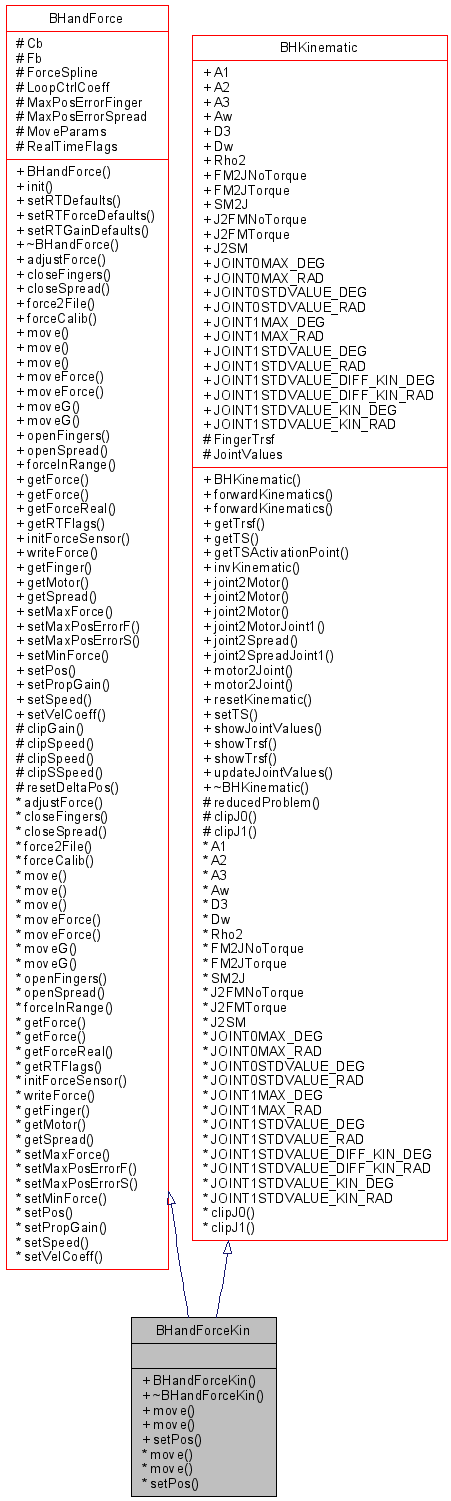
Inheritance diagram for BHandForceKin:
Public Member Functions | |
| BHandForceKin (std::string devName) | |
| Default constructor. | |
| virtual | ~BHandForceKin () |
| Destructor. | |
Movement Commands | |
Movement commands are motor commands: they immediately affect one or more of the motors. | |
| void | move (const Motors motors, const float position[4]) throw (BHandException) |
| Moves all Motors to the given Position. | |
| void | move (const Motors motors, const float position) throw (BHandException) |
| moves motors to position. | |
Movement Parameter Commands | |
Movement parameter commands have effects on the movement commands. | |
| void | setPos (const Motors motors, const float position) |
| Sets the desired positions. | |
This class combines the options of the BHandForce with the ones given by BHKinematic. With this class you are abled to move the joints by using joint angles and not MotorCounts as unit for the commands.
| BHandForceKin::BHandForceKin | ( | std::string | devName | ) |
Default constructor.
| devName | Name of the device for the serial port to which the hand is attached. |
| BHandForceKin::~BHandForceKin | ( | ) | [virtual] |
Destructor.
| void BHandForceKin::move | ( | const Motors | motors, | |
| const float | position[4] | |||
| ) | throw (BHandException) |
Moves all Motors to the given Position.
If the Limit force of one of the fingers is reached, the motion for the coressponding will be stopped. If F1 or F2 force is exceeded Spread Motion will be stoped also.
The proportional gain value of each motor is ignored!
The function watches the Temperature of the Hand!
| motors | Motors to move. | |
| position | Desired positions of motors. Unit: Angle DEG The order of the positions must be [F!,F2,F3,Spread] |
| void BHandForceKin::move | ( | const Motors | motors, | |
| const float | position | |||
| ) | throw (BHandException) |
moves motors to position.
If the Limit force of one of the fingers is reached, the motion for the coressponding finger will be stopped. If F1 or F2 force is exceeded Spread Motion will be stoped also.
The proportional gain value of each motor is ignored!
The function watches the Temperature of the Hand!
| motors | Motors to move. | |
| position | Destinated position. Unit: Angle DEG |
| void BHandForceKin::setPos | ( | const Motors | motors, | |
| const float | position | |||
| ) |
Sets the desired positions.
Sets the positoin to wich the motor should be moved by the nect move(const Motors motors) command.
| motors | Motors to be moved | |
| position | position for the motors. Unit: Angle DEG |
|
|
Generated Wed Aug 16 14:59:16 2006 by
|