BarrettHand
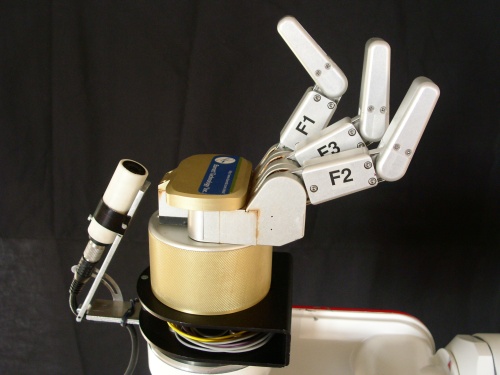
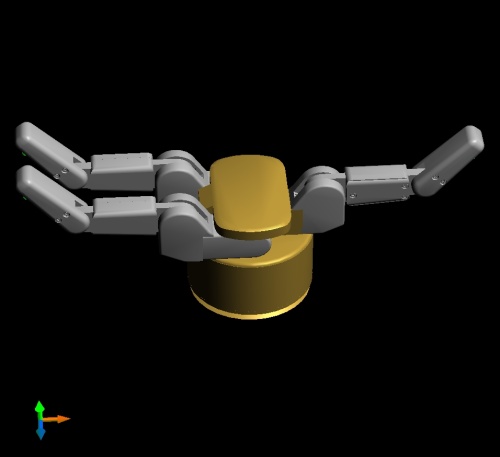
We developed the BHandLib, a C++ library encapsulating the serial communication between hand and workstation. An OpenGL model is also integrated in the library. Contact Tim Baier-Löwenstein for your personal copy.
|
|
MIN-Fakultät Fachbereich Informatik TAMS |
 |
| UHH > MIN > Informatik > TAMS > Research > Robotics > Service Robot > Hardware |
|
We developed the BHandLib, a C++ library encapsulating the serial communication between hand and workstation. An OpenGL model is also integrated in the library. Contact Tim Baier-Löwenstein for your personal copy.
| Legal Notice Privacy Statement |
Last modified: 22.09.2006
|