
Hardware-Setup for TASER
The setup of the hardware of TASER is constantly evolving. On the left side you can find detailed information on the sensors and actuators of the robot. In the initial setup all components were connected directly to the control PC of TASER.
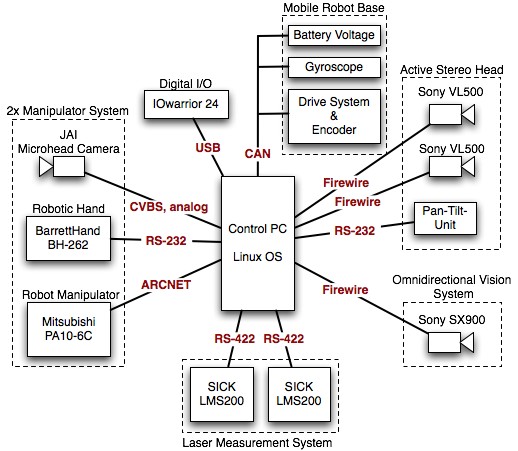
Figure 1: Initial setup of the hardware for TASER.
Now we are unifying the connections by using smart sensors and Ethernet as the main bus system.

Figure 2: Current setup of the hardware for TASER.