|
Software |
|
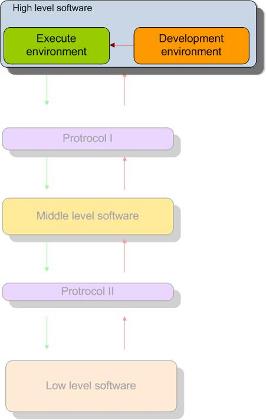
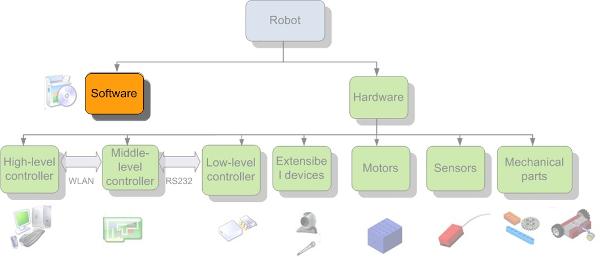
The software part of telerobot system consist of three levels and they execute on the three level hardware controllers separately. The high-level software contains “execute environment” and “development environment”. For more detailed information about software structure of telerobot, please read Diplomarbeit from weining zheng . |

|
High-level software
|
|
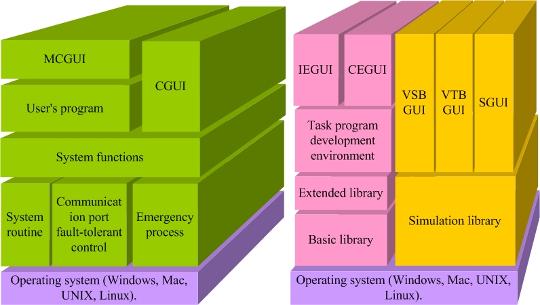
The high-level software consists of two blocks. One is “task program execute environment” which is shown in the left side, the other is “task program development environment” which is shown on the right side of the above figure. Both of these blocks execute on a personal computer. The current high-level software of telerobot project can just run on the Linux operating system. The high-level software which can execute on the Mac and the Windows will be developed later.
The “task program development environment” is a platform for users to program the telerobot. The Basic library support all the basic functions of telerobot inclusive the robot movement functions, the system routine functions and the task functions. The API document of basic library describes all the functions, which includes the telerobot library, the MCGUI library and the CGUI library. The tutorial teaches you how to use and program your telerobot. IEGUI (iconic editor GUI) which is a VPL (visual programming language) environment. CEGUI( code editor GUI) allows an user to program the telerobot textually. The yellow blocks are the simulation parts. VSBGUI (virtual scenario building GUI) , VTBGUI (virtual telerobot building GUI) and SGUI (simulation GUI) are three applications. With these three applications, users can build a virtual scenario, a virtual telerobot object and simulate the task separately. Simulation library supports all the functions of simulation.
The “task program execute environment” is a platform to run the user’s program. After users wrote and compiled their programs, they can execute program either through system console or through MCGUI (monitor and control GUI) application, which shows the robot status information (sensor information and actuator information) very clearly. CGUI (control GUI) is also an application which controls the telerobot directly by user. The system functions, the system routines , the communication port fault-tolerant control and the emergency process are the back ground functions modules that support the high level software runs in order.
|
|
Middle-level software
|
|
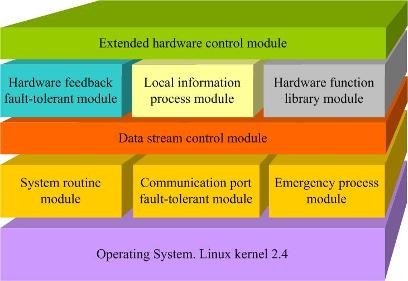
The “Middle-level software” runs on the SBC-2410X. It keeps the communication between the high-level software and the low-level software. It combines and divides the data streams separately. Furthermore it controls the extensible hardware (such as CCD web camera) which connects to the SBC-2410x through its standard interface (USB, serial, etc).
The system routine module, the communication port fault-tolerant module and the emergency process module are working as backstage functions in order to ensure the system efficiency and security. The data stream control module combines and divides the top-down data (the data which is transmitted from high-level software to low-level software) and the bottom-up data (the data which is transmitted from low-level software to high-level software). Hardware feedback fault-tolerant modules ensures the correctness of the feedback information, which is detected by extended hardware. The Local information process module can do some local data process task, such as image (which is captured by CCD camera) segmentation. The hardware function library support the different driver program of the corresponding extensible hardware. The Extend hardware control module controls the working of extended hardware. All the modules run on the Linux (kernel 2.4 ) operating system. |
|
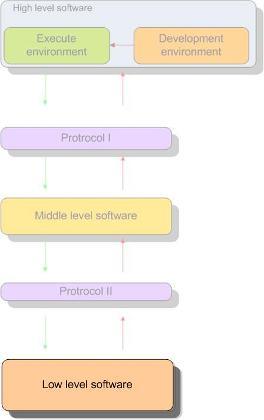
Low-level software
|
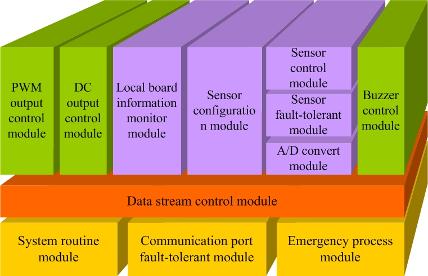
|
The “Low-level software” runs on the Atmega16L based control board. The different module controls the different sensors and actuators. The system routine module, the communication port fault-tolerant module and the emergency process module work are daemons which ensures the system efficient and security. |