|
Hardware |
|
Hardware: Middle-level controller SBC-2410x |
|
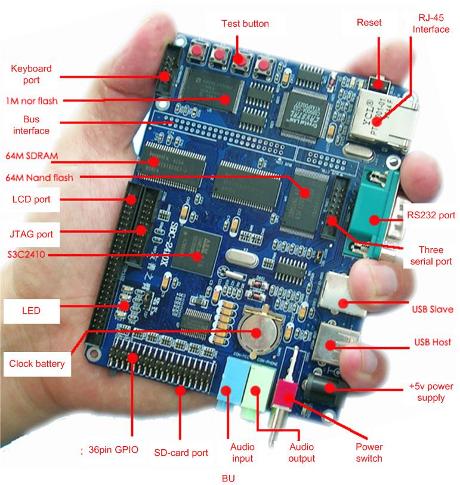
SBC-2410x is an embedded computer system which bases on Samsung ARM processor (kernel ARM920T). The PCB board of SBC-2410x has six levels. It can execute arm-Linux operating system and Windows CE4.2.net operating system.
It is a flexible and ideal control unit for education robot system. For more detail about SBC-2410x please see the following table. |
|
For more detail information about SBC-2410x please see SBC2410x.pdf and the official website.
|
|
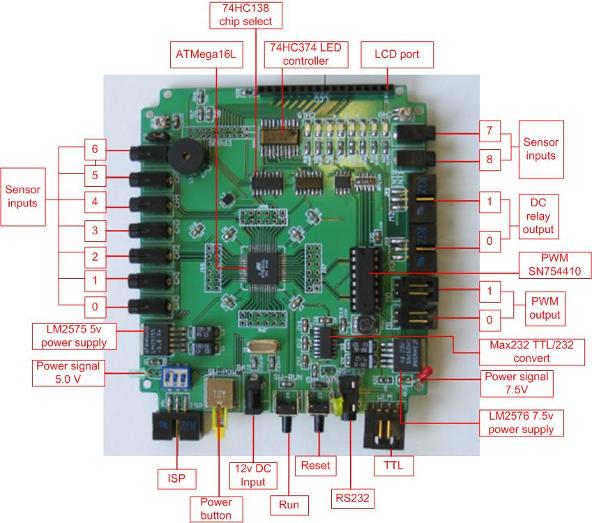
Hardware: Low-level controller ATMega16L based control board |
|
The low-level controller consists of 1. An ATmega16L works as microprocessor 2. 9 channels of sensor input. Channel 0 to 6 can be used as digital or analogue inputs. Channel 7 and 8 can only be used in a digital way. 3. Input power: 8.4v-24v 4. Two communication interfaces on the board: RS232 and TTL, ISP for downloading the programs. 5. Two PWM outputs and two DC outputs which can only be used under on-off mode. 6. LED output 7. RS232 and TTL serial port.
For more detailed about Atmega16L, please read Atmega16L.pdf |
|
Hardware: Sensors |

|
Infrared color sensor. This sensor can detect the black and white color.
It is used in Example I of the tutorial. |

|
Infrared sensor. It detects if there is an object in front of it.
It is used in Example2 and My first “Hello World” of the tutorial. |

|
Optical sensor. This sensor is very sensible. It can detect a luminant object such as fire or lamp.
It is used in Example 3 of the tutorial. |

|
Touch sensor. This sensor has a semicircular button. If this button is pressed, the sensor can detect it. This sensor can be used to build the mechanical unit very flexibly.
It is used in Example 4 of the tutorial. |
|
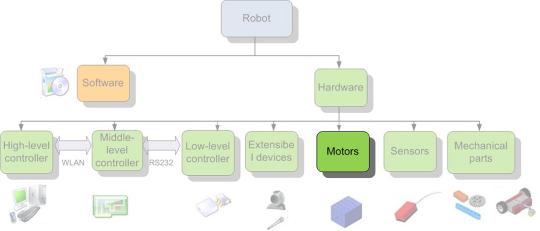
Hardware: Motors and Actuators. |
|
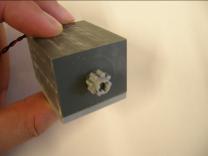
PWM Motor. This motor connects to the PWM output channel of low-level controller. The rotation speed and the rotation direction are adjustable. Two PWM motors can build a movement platform. |

|
Relay Motor. This motor can just be used in on-off mode. The rotation direction is adjustable. This motor connects to the DC relay output channel of the low-level controller. |

|
Lamp. This lamp can be used to control the lumination of the environment. It connects either to the PWM output channel or to the DC relay output channel. The lumination of the lamp is adjustable, if it connects to PWM output channel of the low-level controller.
|
|
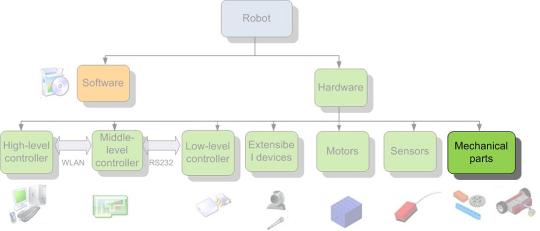
Hardware: Mechanical parts |

|
The mechanical part of telerobot system consists of LEGO 9649 set. It is good quality, cheap and it is very flexible in building different robot mechanical parts. More... |




|
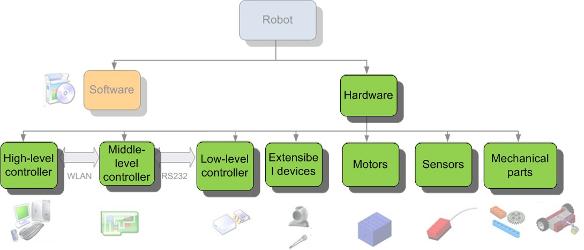
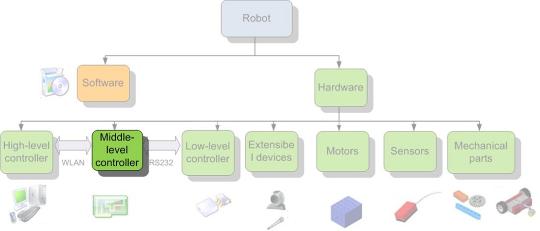
The hardware of telerobot consists of three controllers, different sensors, actuators and mechanical parts. The high-level controller is a personal computer, which keeps the communication with the telerobot through WLAN. The middle-level controller and the low-level control are installed on the telerobot. The communication between the middle-level software and the low-level software is RS232. We build such hardware structure in order to meet the requirements of flexibility, extensibility, easy-handling and low cost.
The Hardware( the low-level controller, the sensors and the motors) is developed by ARMS group of Robotics Institute at Beihang University(BUAA). |



|
The hardware feature of SBC-2410x |
||
|
Index |
Name |
Describe |
|
1 |
CPU |
Samsung S3C2410X, 200MHz~266MHz |
|
2 |
ROM |
1MB AMD Flash ROM 64MB Samsung Nand Flash R |
|
3 |
RAM |
64MB SDRAM, 133MHz update rate |
|
4 |
LAN |
One 10M Ethernet, RJ45 port |
|
5 |
SERIAL |
One DB9 port |
|
6 |
USB |
One USB Host Type A One USB Slave Type B |
|
7 |
Audio |
One Stereo Audio Output One Audio Input |
|
8 |
RTC |
32.768KHz Crystal |
|
9 |
JTAG |
One 20pin standard JTAG port. |
|
10 |
SD Card |
One standard SD Card port |
|
11 |
LED |
Four LEDs |
|
12 |
Button |
Four buttons |
|
13 |
Switch |
One power switch |
|
14 |
Reset |
One reset |
|
15 |
Power |
One +5v power supply |
|
16 |
Fixed Hole |
Six locating holes (inside diameter 3mm, outside diameter 5mm). |
|
17 |
Board size |
120mm*90mm |