Robot Dexterous Manipulation in VR (with ShadowHand and Oculus)
Master Thesis at group TAMS
Motivation
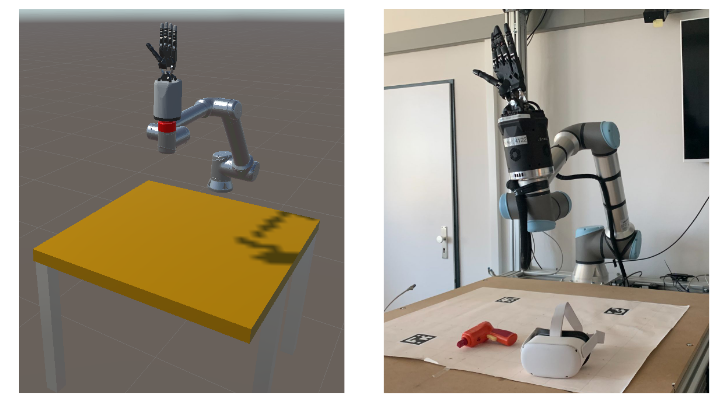
We plan to build an interactive robot simulation environment in VR, mapping real human hand motions to the simulated robot hand in real-time.
The final target is to enable the robot to do multifingered dexterous manipulations like human beings,
such as using chopsticks and power drills, and instruments playing. We will reach the target through several steps:
Build robot simulation environment with Unity (In progress)
Set up communication between ROS and Unity (In progress)
Collect human hand motion dataset (Future work)
Teach the robot to do dexterous manipulation in simulation (Future work)
Transfer learned skills to the real world
Write papers and your thesis
Requirements
- Coding (Python or C++ or C#)
- Basic robotic and computer science knowledge
Contact