
Grasping with an artificial hand


Another way to teach a robot how to grasp an object is to use learning by demonstration. But this method is still error-prone and the detection of movements made by the instructor and occlusion during object grasping makes the problem even more complicated. Nevertheless useful results can be achieved with teaching by demonstration (see Interaction-Page for details)
The service robot TASER is equipped with a three finger BarrettHand, it can be used to grasp a wide
range of objects of our daylie lives.
One problem in grasping objects is the grasp evaluation. Criteria
related to forces miss the object semantics completely. A grasp of a
cup from the top might be very force stable but unusable if something
should be filled into the cup.
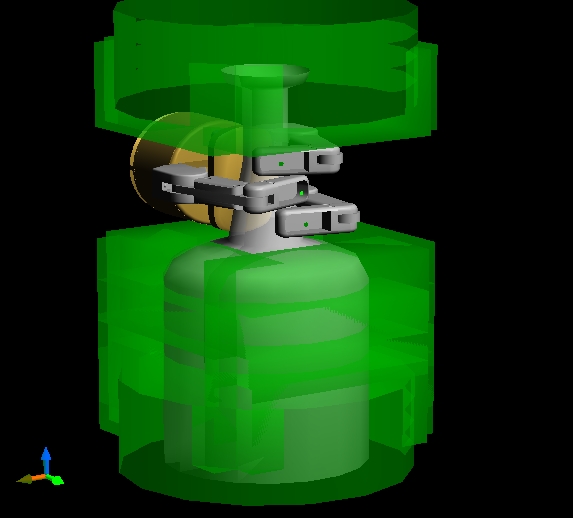
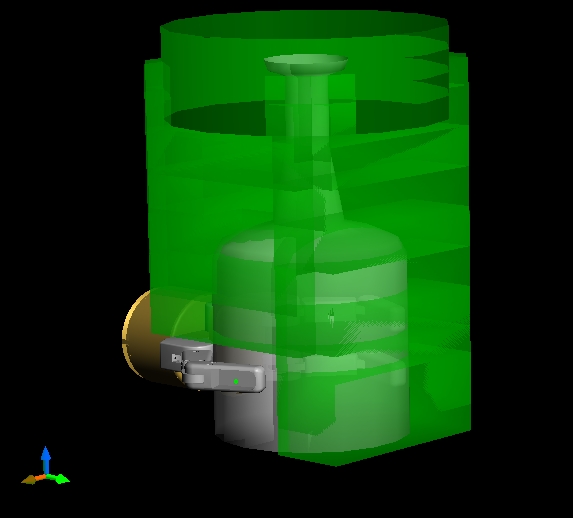
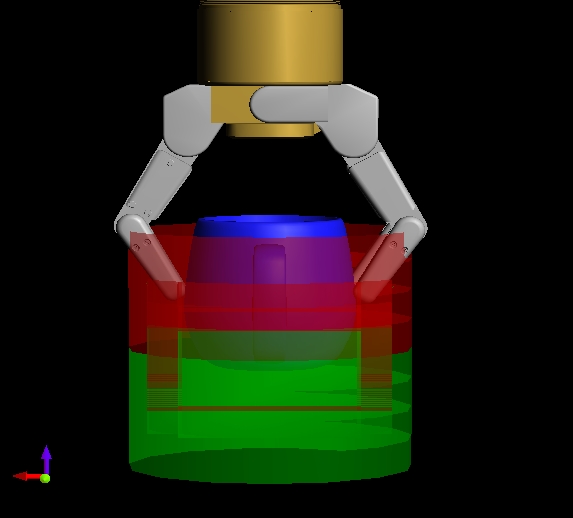
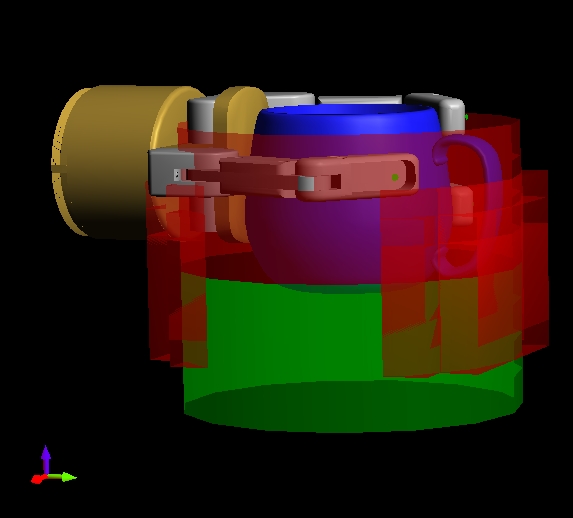
A novel criterion related to overcome this problem has been
developed. The criterion is related to operations being performed
after the object has been grasped. Some examples for a hand-over
operation are presented in the next images. For details see BaierZhang2006.
Below the evalutaion of a hand-over criterion of a mug and a bottel is presented.
 |
 |
 |
 |