
Modular Robot
The last few years have witnessed an increasing interest in modular reconfigurable robotics. The applications include industrial inspection, urban search and rescue, space applications and military reconnaissance. They are also very interesting for research purposes. Modular robots are composed of some identical or similar units which can attach and detach each other and are capable of changing the configurations.
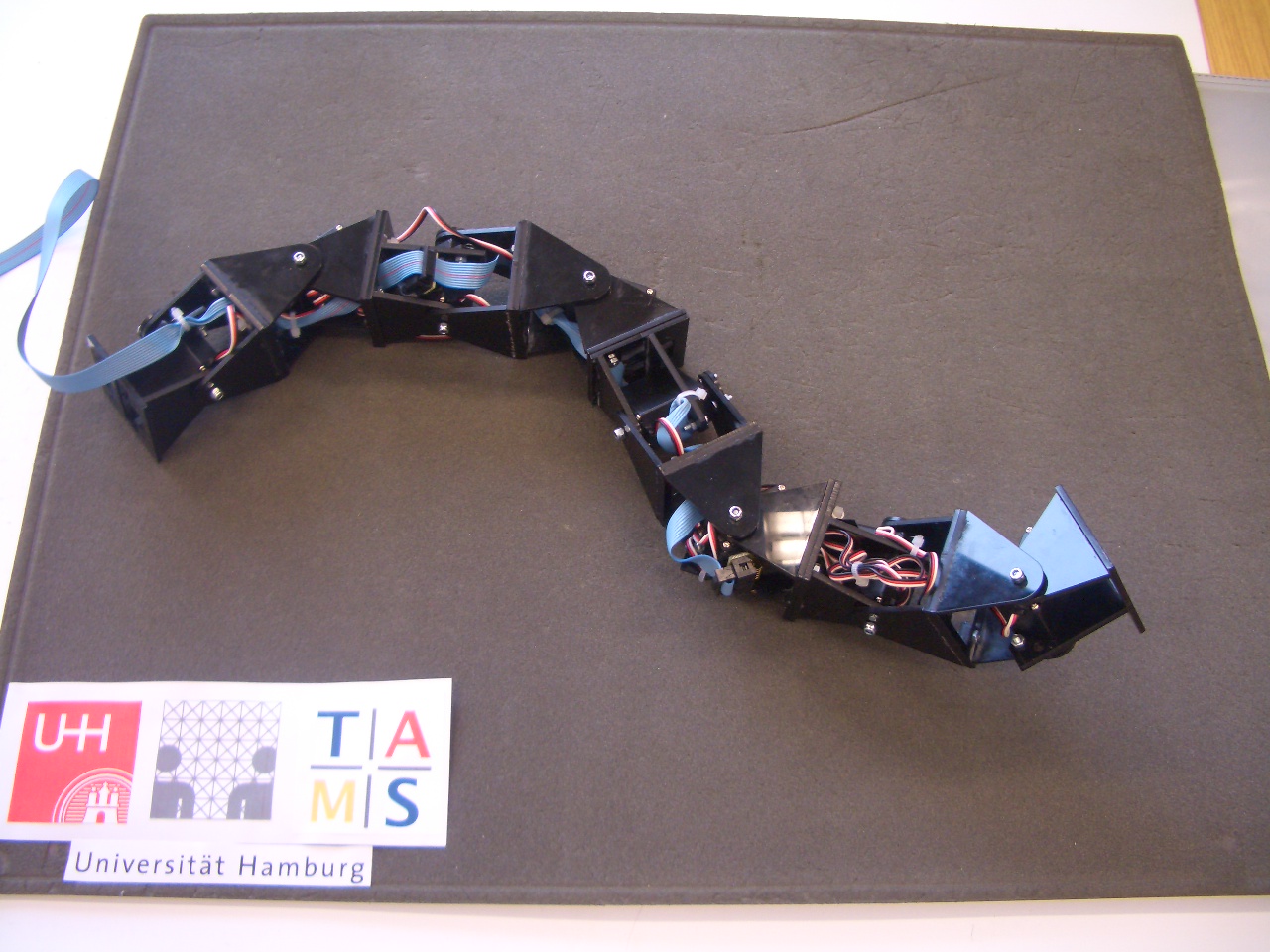
Some modular prototypes are quite famous, such as Polybot from Mark Yim, CONRO and SuperBot from Information Sciences Institute and Computer Science, M-TRAN robot from Kamimura. Some common ideas of these prototypes lie in two points. Normally this kind of robots consists of many modules which are able to change the way they are connected. In further the modular approach enables robots the reconfiguration capability which is very essential in such tasks which are difficult for a fixed-shape robot. It also enables the mobile robotic system the characteristics of versatility, robustness, low-cost and fast-prototyping so that new configurations of different robots can be built fast and easily, for the exploration, testing and analysis of new ideas. More exciting advantage is that the robots have the capability of adopting different locomotion to match various tasks and suit complex environments.A new improved modular robot named CUBE-M is developed recently, which is based on the cooperation with Ph.D. Juan González-Gómez from the School of Engineering, Universidad Autonoma de Madrid in Spain. It features easy-handling, fast-building and low cost mechanical design and efficient control algorithm for the active joints which endow the robot with the ability of changing shape in two dimensions. Using docking blots, the modules can connect or disconnect easily and flexibly. Each joint actuated by a RC servo is controlled by means of a sinusoidal oscillator with four parameters: amplitude, frequency, phase and offset.

|
|
| Cooperation with Juan González-Gómez | Coopearation during ClAWAR conference |
|

|
| Y1 Module | CUBE-M |
More details could be found on the related webpage.
Congratulate
Juan has finished his tough study and got a Dr. title.

|
| Dr. Juan González-Gómez Oral Defense |
Other information
Workshop on modular robots (Link)
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).