|
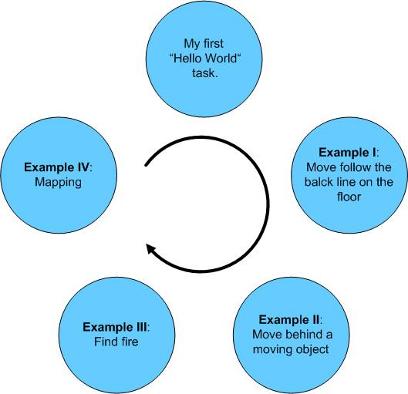
The first step: The first “hello world” program. The second step: Example 1: Move follow the black line on the floor. The third step: Example 2: Move behind a moving object. The fourth step: Example 3: Find fire The fifth step: Example 4: Mapping. |
|
Tutorial: |

|
This page gives an easy tutorial for users to learn the Telerobot system by degrees. We introduce five different examples which are designer by the system developer. These five examples have used all four type sensors and DC output devices.
|


