
Gecko Robot
2/2004-present, As Technical coordinator of the project
"A flexible smart climbing robotic platform for civil rescue and search in urban environments"
The project is based on the cooperation with Dr. Rong Liu from BUAA, who is currently a visting scholarship at TAMS.
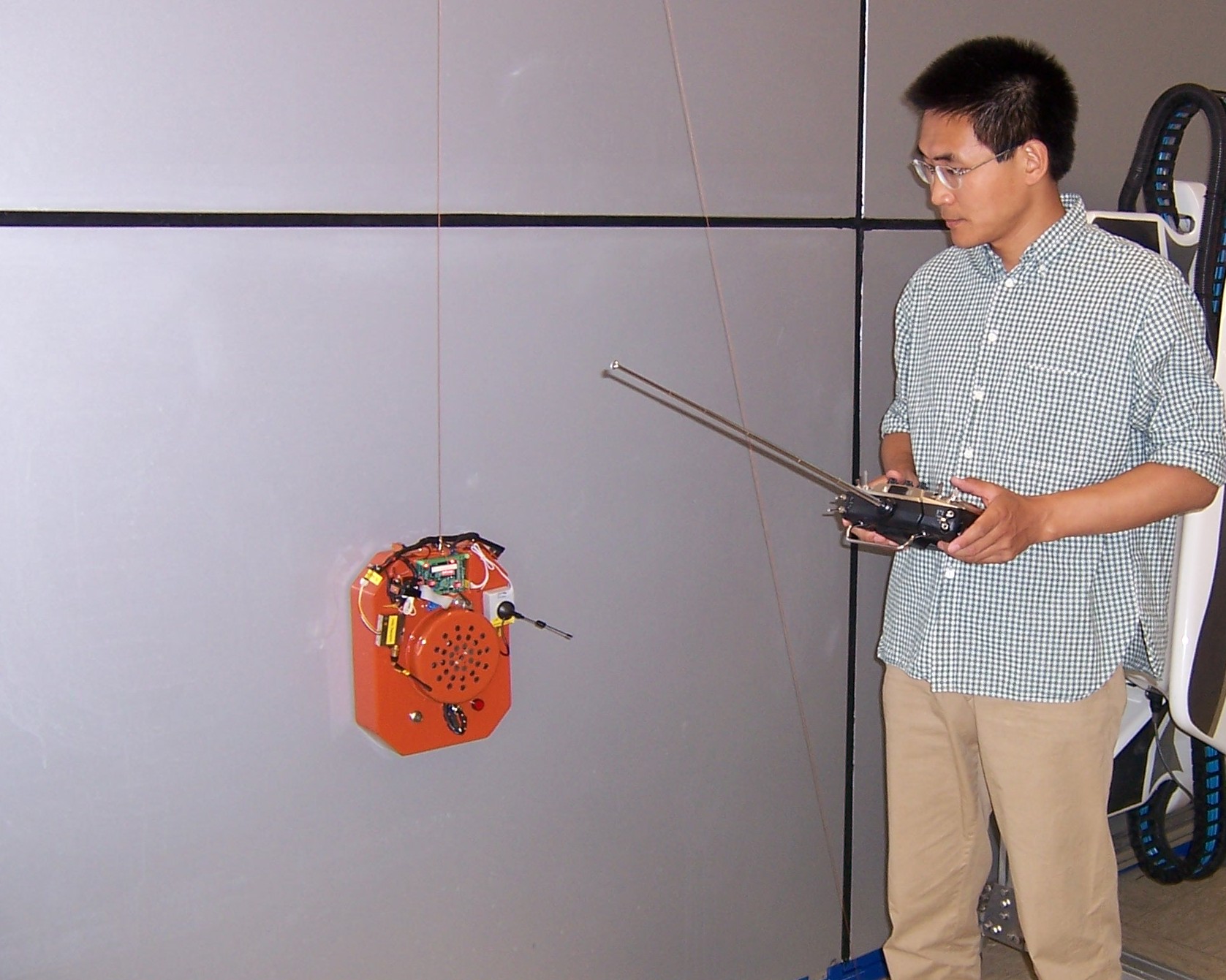
We proposed a lightweight smart wall-climbing robot for rescue missions last year, which was developed as a flexible mobile platform carrying a CCD camera and other sensors. Firstly we designed a semi-autonomous climbing prototype with wheels and negative pressure, as shown in Fig. This prototype is only 300mm wide and 200mm long, the weight is 3kg including the battery.
Path planning is concerned with the problem of moving an entity from an initial configuration to a goal configuration. The resulting route may include intermediate tasks and assignments that must be completed before the entity reaches the goal configuration. Path planning algorithms can be classified as either global or local.
This project's aim is to develop an effective and easily-computed path planning for our new smart climbing robot.
In fact, even if the path planning methods for mobile ground-robots and those of wall-climbing robots have a lot in common, the latter still feature some particular characteristics including the following three aspects:
1) Prior knowledge of the global environment and local unexpected obstacles; the global environment is known in advance so that it can be considered as a static model. On the other hand, there are a lot of unexpected obstacles on the work target such as window frames and bars. From this point of view, the local working environment on the wall is dynamic and unknown. The path trajectory is also based on local sensorial information. Multiple sensing and control systems are incorporated to handle uncertainties in the complex environment. The software to be developed should therefore be dexterous enough to identify the various geometries of the wall and intelligent enough to autonomously reconstruct the environment.
2) Working environment constraints and movement function constraints; the robot should move in both the up-down direction as well as the right-left direction to get to every point on the wall. The robot has to face all obstacles and cross them safely and quickly so that he can cover the whole area. At the same time, the climbing robot has to be safely attached to the glass wall and has to overcome gravity. Path planning will have to take both aspects into account. Generally, the working environment constraints and the working target constraints simultaneously influence the trajectory a great deal.
3) Evaluation by the synthesis of standards; the standards of choice and evaluation for the different kinds of path planning should synthesize work safety, efficiency and the percentage of movement coverage.
As a conclusion, unlike the evaluation standard for mobile ground-robots, it is not possible to employ any single standard for choosing the climbing path.

|
|
| Gecko Robot first version | Current version of climbing Gecko |
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).